
下载掌阅APP,畅读海量书库
立即打开




近几年来,以伪谱法为代表的直接法在计算速度上的优势,广泛应用于处理非线性系统最优控制问题 [11] 。在Radau伪谱法基础上形成的hp-Radau伪谱法即hp自适应伪谱法,能够根据误差要求,对差值多项式阶数进行自适应调整或者对网格进行细化,在满足既定精度下,能够提高求解速度,适用于航迹规划问题的求解。
采用hp自适应伪谱法求解最优控制问题,需要对时间区间进行变换,把 t ∈[ t 0 , t f ]划分为 K 个网格区间[ t k-1 , t k ](其中 k =1,2,…, K ),总共包括 K +1个分割点 t 0 < t 1 <…< t K = t f 。对划分的时间网格区间做如下变换:

通过此变换将每个 t ∈[ t k-1 , t k ]都转换到 τ ∈ [−1,1]区域内,并对 t 求导可得

hp自适应伪谱法的基本原理为:首先将状态、控制变量在配点上进行多项式近似,然后将状态方程、状态变量、约束方程和代价函数在配点上离散化,将连续最优控制问题转化为非线性规划问题。本节将航迹规划分为两段,各段处理方式是一致的。假设 X ( k ) ( τ )和 U ( k ) ( τ )为第 k 个网格区间的状态变量和控制变量。
2.2.1状态变量及控制变量的多项式近似
定义Lagrange插值多项式形式为

式中,第
k
个网格时间区间的配点用
 表示,
N
k
表示第
k
个时间网格内的配点数。第
k
个时间网格中的状态变量用
N
k
+1个Lagrange插值多项式
表示,
N
k
表示第
k
个时间网格内的配点数。第
k
个时间网格中的状态变量用
N
k
+1个Lagrange插值多项式
 (
τ
)(
j
=1,…,
N
k
,
N
k
+1)作为基函数进行近似处理,状态变量离散为如下形式:
(
τ
)(
j
=1,…,
N
k
,
N
k
+1)作为基函数进行近似处理,状态变量离散为如下形式:

采用同样方式,对控制变量进行离散化处理,有:

2.2.2状态方程离散化
由上述可知,状态变量对时间的导数近似于对式(25)求导,从而用一组代数约束代替微分方程约束。式(25)对时间求导为

将式(27)代入运动学微分方程即式(11)中,并通过在配点上离散处理,可得

2.2.3路径约束离散化
在 N k 个配点处将过程约束 C [ X ( t ), U ( t ), t ] 离散处理,得到如下形式:

2.2.4末端约束离散化
在 N k 个配点处将过程约束 C [ X ( t ), U ( t ), t ] 离散处理,得到如下形式:

2.2.5连接约束离散化
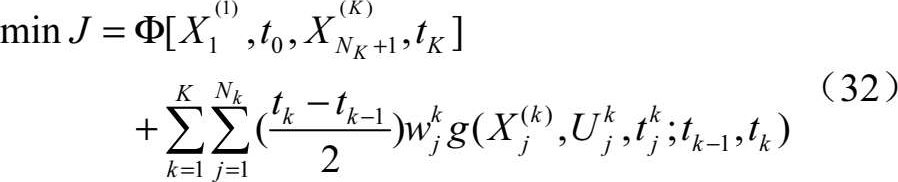
2.2.6代价函数离散化
用Lagrange积分替代代价函数积分项,代价函数离散处理后的形式如下:
式中,
 (
j
=1,…,
N
k
,
k
=1,…,
K
)为Lagrange多项式的系数。
(
j
=1,…,
N
k
,
k
=1,…,
K
)为Lagrange多项式的系数。
通过以上变换,连续最优控制问题转化为了非线性规划问题。离散化的表达式如下:
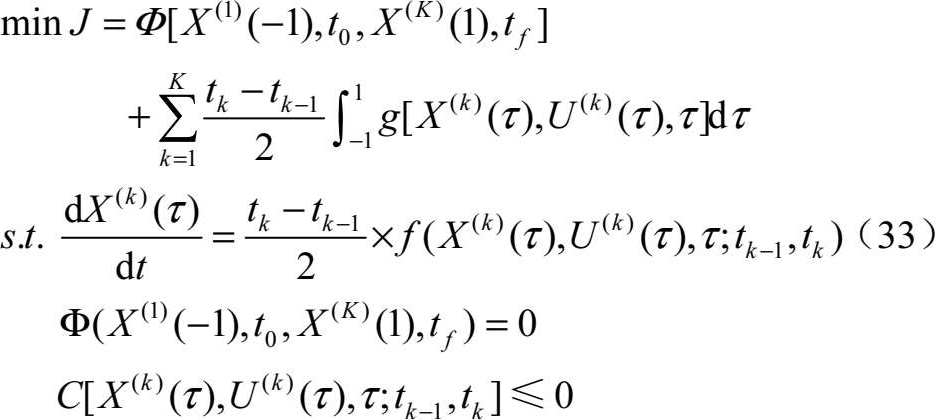
针对分段处理的问题,需要增加连接约束的离散化方程:
hp自适应伪谱法能够对是否增加Lagrange插值多项式的阶数( p -细化)或者网格重规划( h -细化)进行自适应处理,来满足既定的离散偏差要求。
设状态微分方程与约束离散处理的允许偏差为
e
,在第
k
个时间网格中,状态微分方程和离散处理后的状态间误差为
 ,约束条件离散处理后的偏差为
,约束条件离散处理后的偏差为
 。在算法运行过程中,hp自适应伪谱法将对
与
进行实时解算,表达式为
。在算法运行过程中,hp自适应伪谱法将对
与
进行实时解算,表达式为

式中,1≤ l ≤ L , l ≤ i ≤ n , l ≤ j ≤ m ,L为各网格区间内的配点数, n 为计算过程中的状态微分方程个数, m 为约束条件个数。
将状态变量的每一数值及其相对应的控制变量数值代入式(35)和式(36)计算实时误差
和
 ,如果在当前时间网格内,满足
≤
e
和
≤
e
,则说明当前的处理方式满足精度要求。如果
≤
e
与
≤
e
无法同时满足,则说明需要进行时间网格的重新调整(
h
-细化)或增加Lagrange差值多项式的阶数(
p
-细化),以满足精度要求。
,如果在当前时间网格内,满足
≤
e
和
≤
e
,则说明当前的处理方式满足精度要求。如果
≤
e
与
≤
e
无法同时满足,则说明需要进行时间网格的重新调整(
h
-细化)或增加Lagrange差值多项式的阶数(
p
-细化),以满足精度要求。
定义
 为自适应系数,判别原则为
为自适应系数,判别原则为
