
下载掌阅APP,畅读海量书库
立即打开




在智能汽车设计中,速度反馈是一个重要环节,良好的速度反馈是智能汽车在高速运行过程中精确调节速度的前提。速度反馈值可以让PID速度调节算法(详见软件设计部分)更加迅速地调整智能汽车的加速与减速,让智能汽车在直线可以加速行驶,并且在进入弯道前降低速度,保证稳定过弯。本节以光电脉冲原理测速传感器为主介绍智能汽车测速电路设计。首先介绍一下光电脉冲测速原理。
光电式脉冲编码器可将机械位移、转角或速度变化转换成电脉冲输出,是精密数控采用的检测传感器。光电编码器的最大特点是非接触式,此外还具有精度高、响应快、可靠性高等特点。
光电编码器采用光电方法,将转角和位移转换为各种代码形式的数字脉冲,如图2.4.1所示为光电脉冲测速原理示意图,在发光元件和光电接收元件中间有一个直接装在旋转轴上的具有相当数量的透光扇形区码盘,在光源经光学系统形成一束平行光投在透光和不透光区的码盘上时,转动码盘,在码盘的另一侧就形成光脉冲,脉冲光照射在光电元件上就产生与之对应的电脉冲信号。
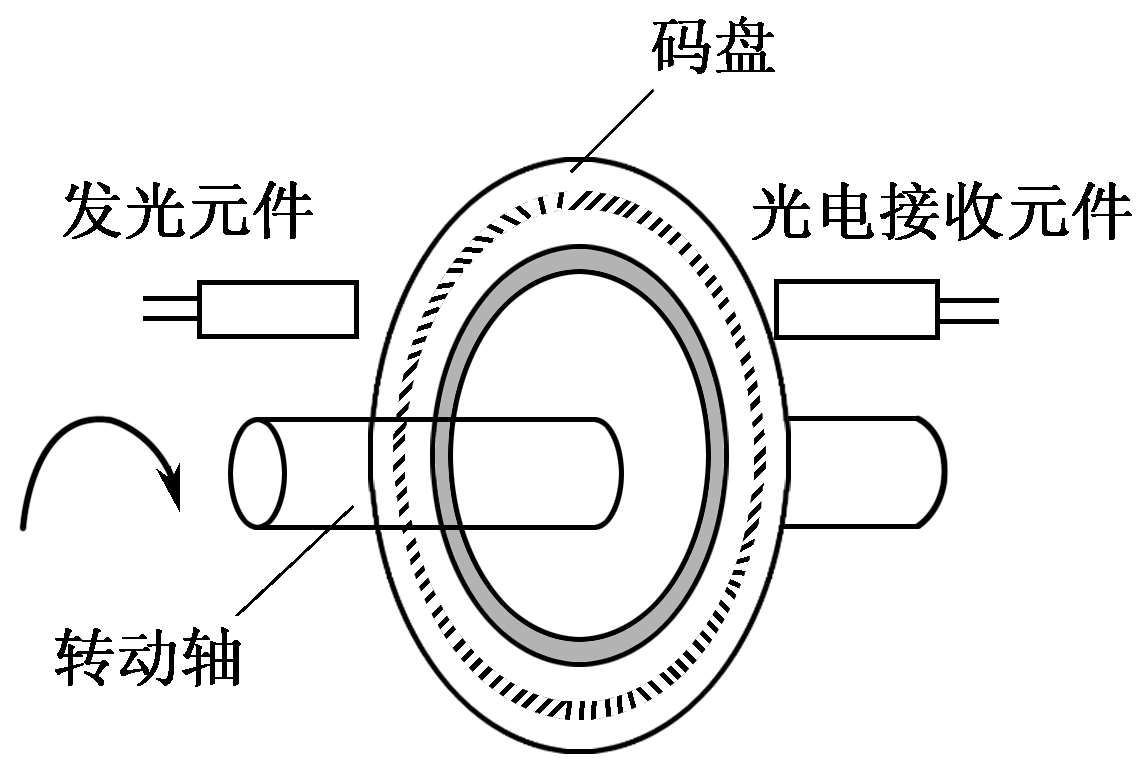
图2.4.1 光电脉冲测速原理示意图
光电编码器的精度和分辨率取决于光电码盘的刻线数的精度。目前已能生产径向线宽为6.7×10 -8 rad的码盘,其精度达1×10 - 8 ,比接触式码盘编码器的精度要高很多个数量级,如进一步采用光学分解技术可获得更高精度的光电编码器。
光电编码器按其结构的转动方式可分为直线型线性编码器和转角型轴角编码器两种,按脉冲信号的性质可分为有增量式和绝对式两种类型。
增量式编码器码盘图案和光脉冲信号均匀,可将任意位置设为基准点,从该点开始按一定量化单位检测。该方案无确定的对应测量点,一旦停电则失掉当前位置,且速度不可超越计数器极限的相应速度,此外由于噪声影响可能造成计数积累误差。该方案的优点是其零点可任意预置,且测量速度仅受计数器容量的限制。
绝对式编码器的码盘图案不均匀,编码器的码盘与码道位数相等,在相应位置上可输出对应的数字码。其优点是坐标固定,与测量以前状态无关,抗干扰能力强,无累积误差,具有断电位置保持,不进行读数时移动速度可超越极限响应速度,不需方向判别和可逆计数,信号并行传送等;其缺点是结构复杂、价格高。要想提高光电编码器的分辨率,需要提高码道数目或者使用减速齿轮机构组成双码盘机构,将任意位置取作零位时需进行一定的运算。
使用单片机的脉冲累加器模块可以记录下光电开关所产生的脉冲数量,然后使用定时器模块读取固定时间内的脉冲个数,即可得知智能汽车的当前速度。
基于上述原理,制作智能汽车时可以使用光电开关及码盘制成简单的测速模块,也可购买成品的测速码盘来使用。网络上出售的测速码盘一般价格都在20元以内,相对价格高昂的编码器,光电码盘价格经济且实用,但是由于精度很高的码盘极易损坏,则码盘裸露在外限制了精度,故无法与封装完整的编码器相媲美。图2.4.2所示为光电开关,图2.4.3所示为码盘。
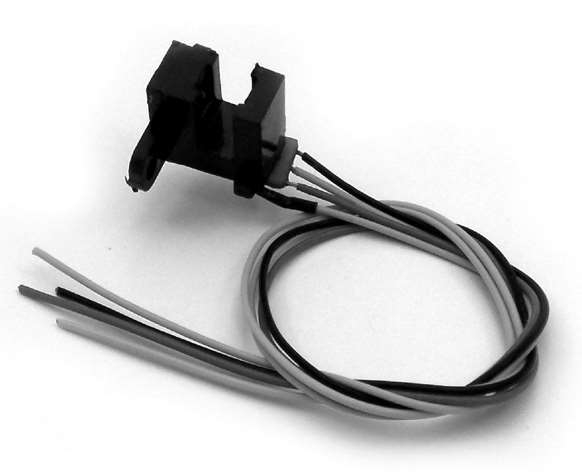
图2.4.2 光电开关(双相)
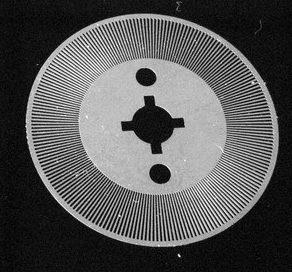
图2.4.3 码盘(200线)
光电码盘之间也有不同,一部分集成度相对高的光电开关可以直接输出方波信号,图2.4.3所示的光电开关就是相对高级的一种光电开关,它可以直接输出方波信号,而且还具备双相输出,通过两相号的相位差可以得知码盘转动的方向。而价格相对较低的光电开关输出为正弦信号,由于单片机的脉冲累加器模块只能读取方波信号,所以需要使用电压比较器或者施密特触发器来实现正弦信号到方波信号的转换。图2.4.4给出正弦信号到方波信号的转换方案。
如图2.4.4所示的示例电路为双路码盘测速设计,J23、J14分别为码盘的接口,一般情况下如果码盘需要测得一路信号则需要测量J23、J14中的E引脚输入信号。R32、R124为上拉电阻,若不接入上拉电阻,则码盘产生的正弦波伏值太小而无法检测。一片LM393集成双路运放可以为两个码盘提供信号转换。在运放的反相输入端输入参考电压,同向输入端输入码盘产生的正弦信号则可以在运放的输出端得到方波信号。
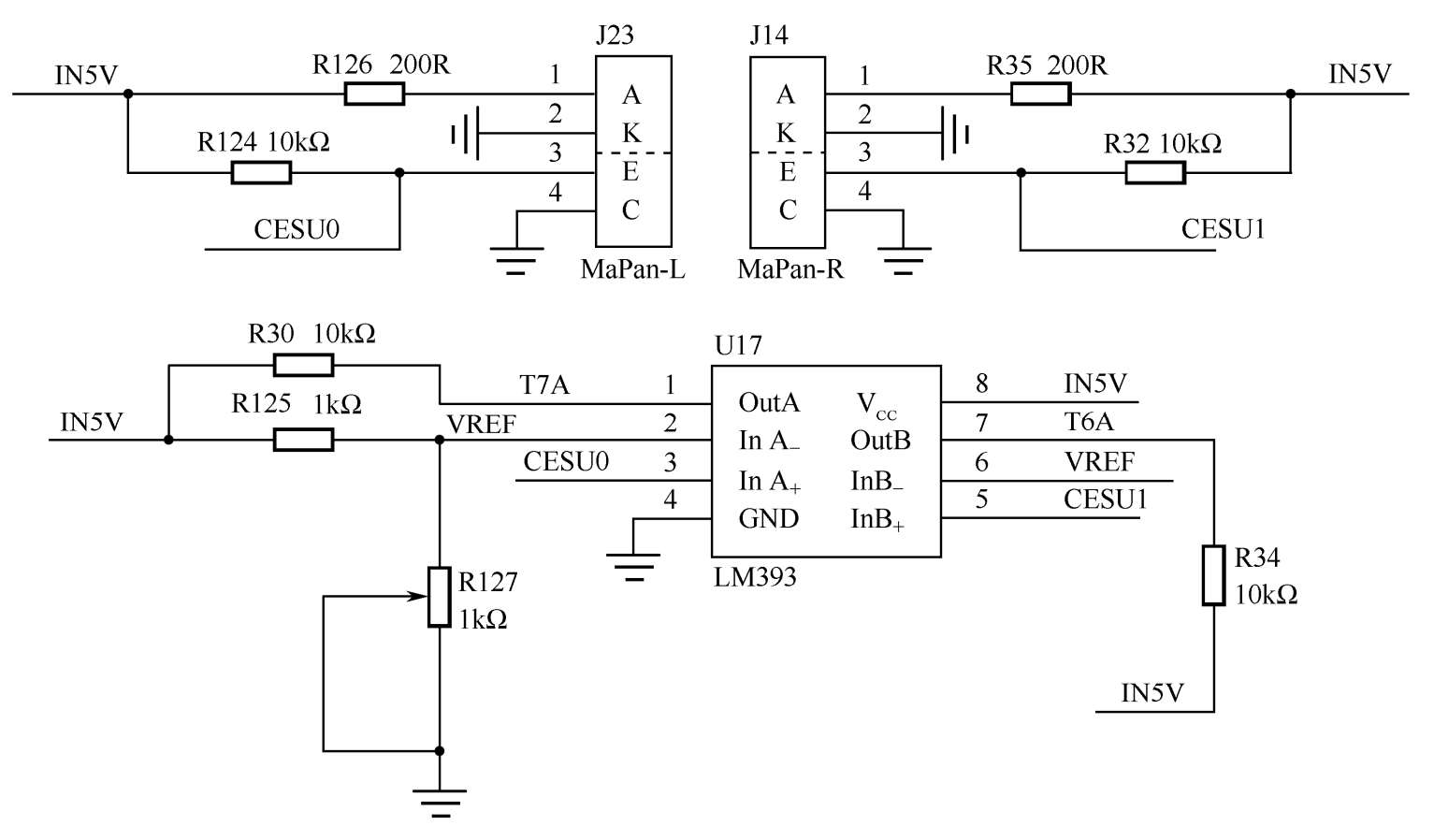
图2.4.4 LM393正弦信号转方波信号的电路示例
一般情况下智能汽车只需要一路测速,因此只是用上面测速方案的一路即可。对于直立自平衡组,则需要两路测速来保证智能汽车的正常运行。有关直立车的测速方案将在光电直立组的设计实例中进行介绍。如图2.4.5所示为码盘的安装方式。
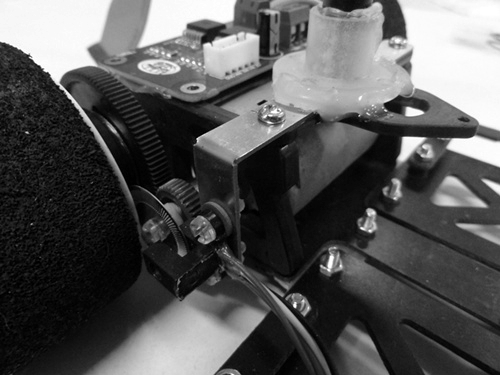
图2.4.5 码盘的安装方式
上文中介绍的码盘测速方案结构简单,但是测速的精度有限。对于很多队伍来说,稳定且高精度测速是必不可少的,所以需要使用光电编码器来实现测速。
旋转编码器是用来测量转速的装置,光电式旋转编码器通过光电转换可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量的形式输出(REP)。它分为单路输出和双路输出两种。技术参数主要有每转脉冲数(几十个到几千个都有)和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组A/B相位差为90°的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。
编码器封装精度高,测速准确,码盘和电路都封装在编码器内,极大地降低了损坏的概率。现在常用的编码器为欧姆龙公司生产的100线、200线或500线编码器。如图2.4.6所示的编码器为欧姆龙EA62-CW3C型100线编码器,其具有双向测速功能,可直接输出方波,通过两路方波的相位差来识别转动方向。供电电压为5~12V,完全兼容智能汽车的供电电平。

图2.4.6 欧姆龙EA62-CW3C编码器(100线)
值得一提的是,有很多高仿的欧姆龙编码器,其价格相对原装的欧姆龙编码器低廉很多,但高仿编码器产生的脉冲信号需要上拉电阻才能被单片机检测到,而且故障率相对原装的要高很多。但是由于原装编码器价格太过昂贵,且高仿编码器的功能已经完全可以满足广大智能汽车选手的制作需求,因此在比赛中很多车队都选择了高仿编码器来进行测速。
在编码器的使用过程中,由于编码器自身输出信号有电压信号及电流信号,为了避免电路波动时编码器的输出信号对单片机造成影响,建议在编码器与单片机之间的电路中加入光耦,从而保证单片机的正常工作。
在编码器工作过程中,其输出的脉冲频率高达万赫兹的级别,因此前文中介绍的TLP181无法正常转换高频的脉冲信号。针对编码器的光电隔离,建议使用TLP115A来实现。TLP115A的转换频率远大于TLP181,其价格相对TLP181也较高,正品TLP115A的价格大约在5元左右。图2.4.7和图2.4.8分别为TLP115A的外形图和引脚定义图。
图2.4.7 TLP115A(5-MFSOP)
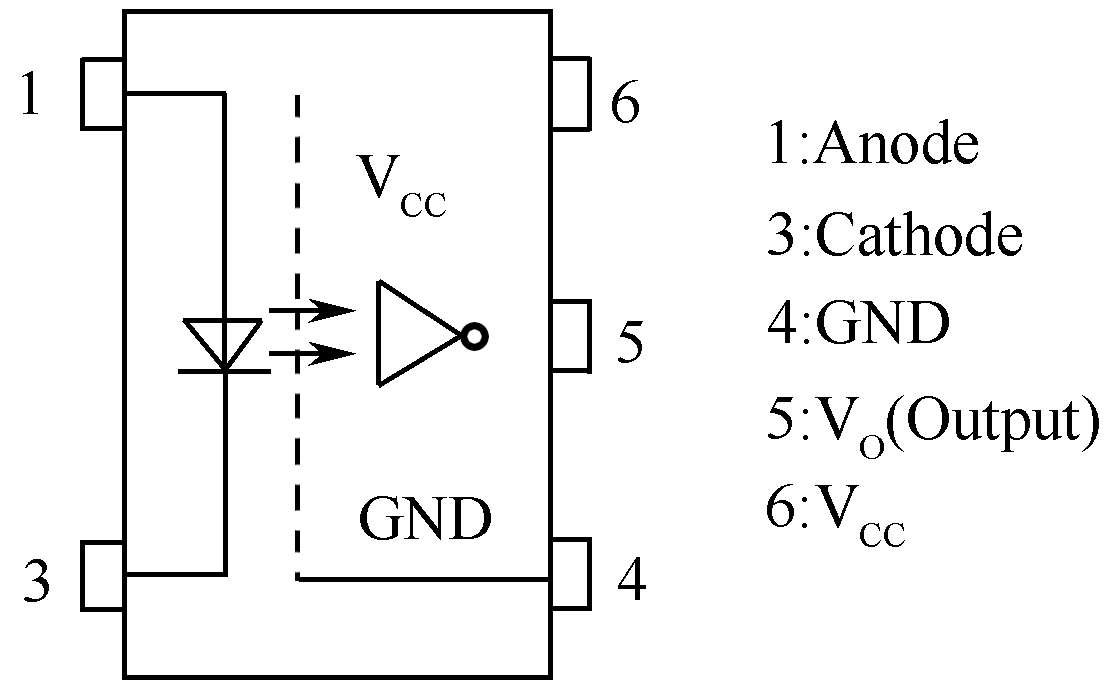
图2.4.8 TLP115A引脚定义图
如图2.4.9所示,编码器的输出脉冲信号由Pout输入光耦,经过光耦隔离,由5号引脚输出到单片机的脉冲累加器。其中,可以看到光耦供电为3.3V,因为该电路搭配3.3V供电的K60芯片使用,所以5V供电编码器输出的TTL电平型号通过光耦的脉冲信号也被转换为3.3V的脉冲信号,从而实现了信号的隔离与电平的转换,确保了单片机运行的稳定性。
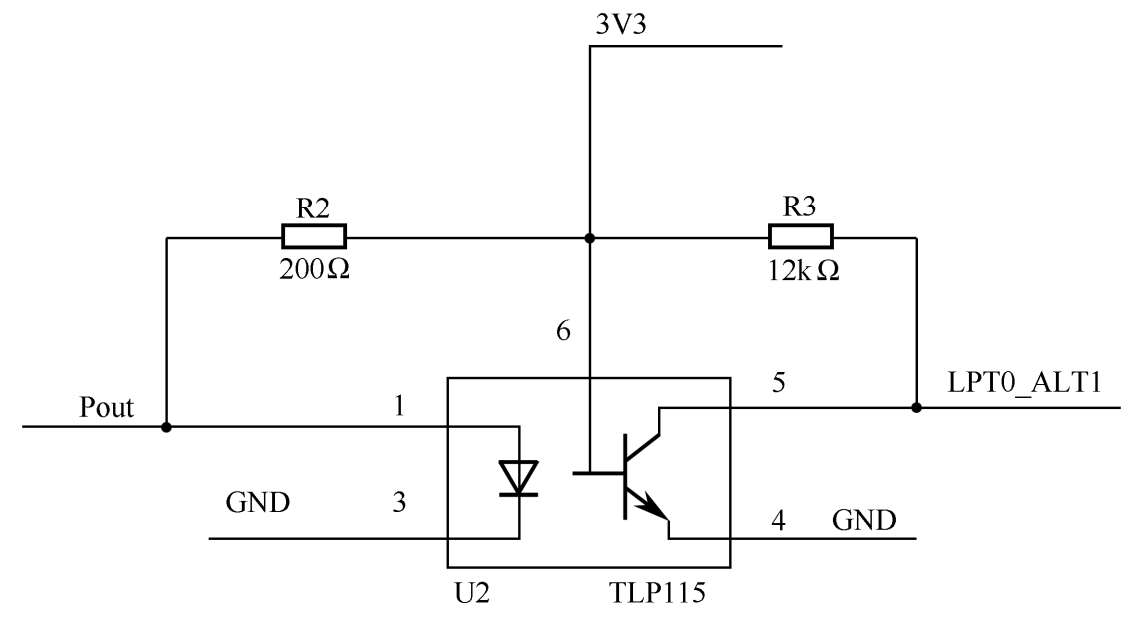
图2.4.9 TLP115A光电隔离示例电路
除了主流的测速方式,也有部分学校队伍采用第五轮测速方式。普通的编码器安装方式为测量差速齿轮的转速,但是由于智能汽车在过弯过程中因为差速打滑而有可能造成测速不准,所以便有学校采取了第五轮测速方案。
图2.4.10为编码器与差速齿轮相连接的测速方式,第五轮测速的安装方式如图2.4.11所示。
图2.4.11所示的第五轮测速的安装方式可以测得智能汽车当前运行的实际速度,从而可以更加精确地获得速度反馈值来用于智能汽车的PID调速。利用此方式还可以构成更高端的双闭环测速方案,内环电动机转速闭环,外环是速度闭环,从而对速度的控制更加精确、快速。

图2.4.10 编码器与差速齿轮相连接的测速方式
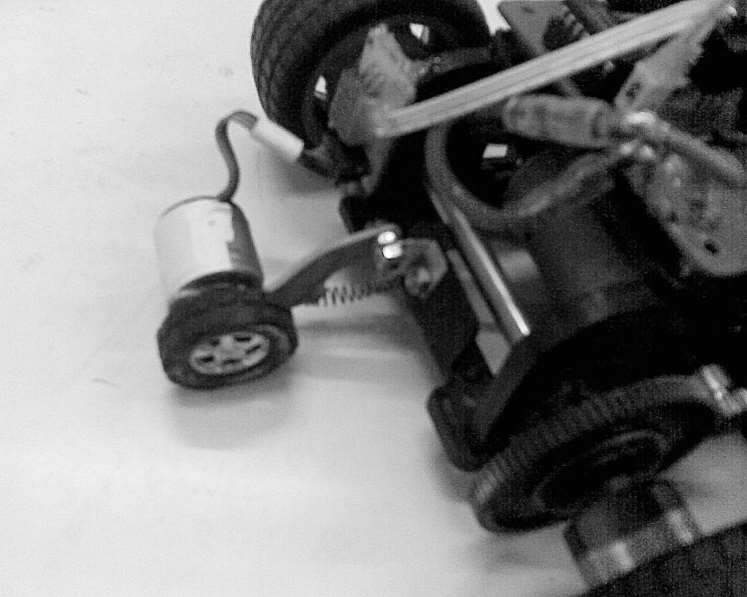
图2.4.11 第五轮测速的安装方式