
下载掌阅APP,畅读海量书库
立即打开



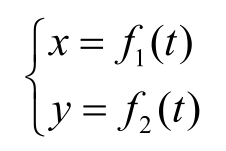
轨迹方程法的前提是定位控制对象在平面上的运动轨迹必须有确定的参数方程表达式。所谓参数方程是指曲线上任一点的坐标(x,y)都是某个变量t的函数。因此,曲线方程Y=f(X)就变成了一个参变数t的方程组,如下式:
下面仅就直线和圆介绍一下轨迹控制的程序设计思路。
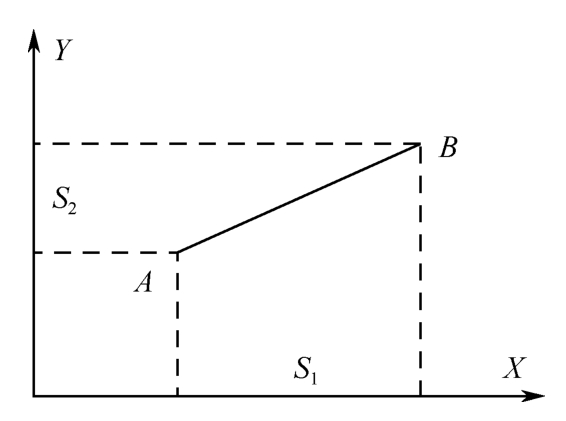
图1-73 直线轨迹控制分析
图1-73为一平面坐标上的直线运动。物体从当前点A沿直线位移至目标位置B,设直线在X轴方向上的位移距离为S 1 ,在Y轴方向上的位移为S 2 。X轴的运动速度为V 1 ,Y轴的运动速度为V 2 ,则有:
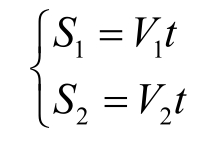
为保证运行轨迹是直线AB,X轴和Y轴运行同时开始还必须同时结束,即运行时间是一样的,则由上述方程得到:
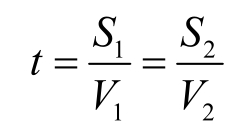
上面的数学分析说明,在应用独立两轴同步控制同一物体在平面上进行非轴向方向上的直线运动时,只要保证两轴的位移与速度之比相等就可以完成平面上的直线运动。因此,在应用定位控制指令(PLSY、DRVI、DRVA等)分别对两轴进行同步控制时,如果两轴的输出脉冲数和输出脉冲频率之比相等,则可以完成平面上非轴向方向上的直线运动。
这种直线轨迹控制方法理论分析是可以使用的,但由于在实际应用时受到加减速时间的影响,即在加速时间和减速时间里位移与速度之比会因不相等而产生同步,另外还会受到程序扫描的影响,即两轴的定位指令是不可以同时执行的,也就是说,在刚开始和结束时也是不同步的,这些都会影响运动的精度。
上面对直线的轨迹分析不能应用到其他曲线上,对其他曲线则采用增量控制算法。这种轨迹控制法的算法是:选择参数方程的参变数t为运动增量,使其增量做微小的(Δt)增加或减小的变化。PLC根据参数方程表达式分别计算其在X方向和Y方向上的增量值,如果其中有一个方向上的增量值出现单位位移量的增、减时,则发出指令使对象在该方向上进行前进或后退一个单位位移量的运动。如果计算结果在X方向和Y方向上都没有出现某个方向上的单位位移量的增、减时,则继续增加Δt 变化,又重新重复上述计算及运动过程,直到参数 t 的变化使对象完成整个运动轨迹为止。
下面以圆为例给予简单说明。圆的参数方程为(假定圆心在坐标原点)图1-74右边的表达式,式中R为圆的半径。
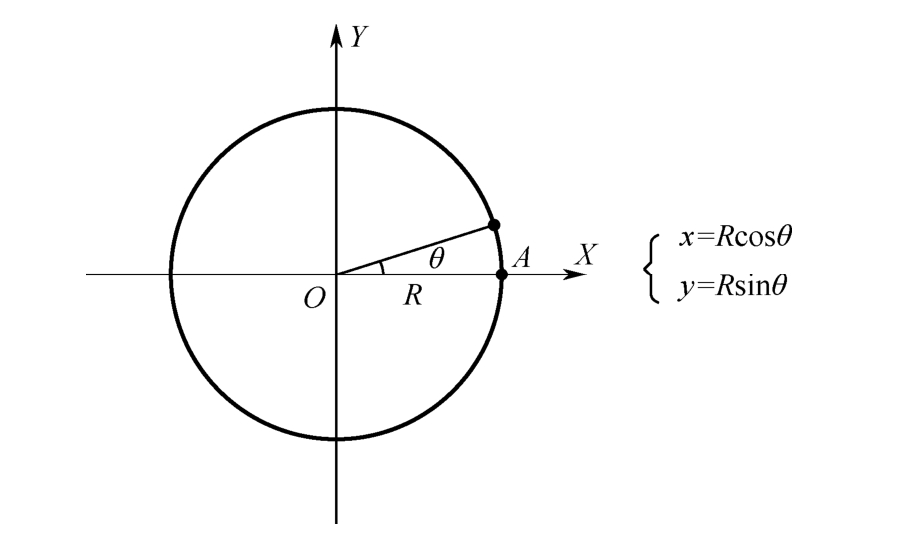
图1-74 圆的参数方程
对于圆的轨迹控制法算法如图1-75所示,说明如下。
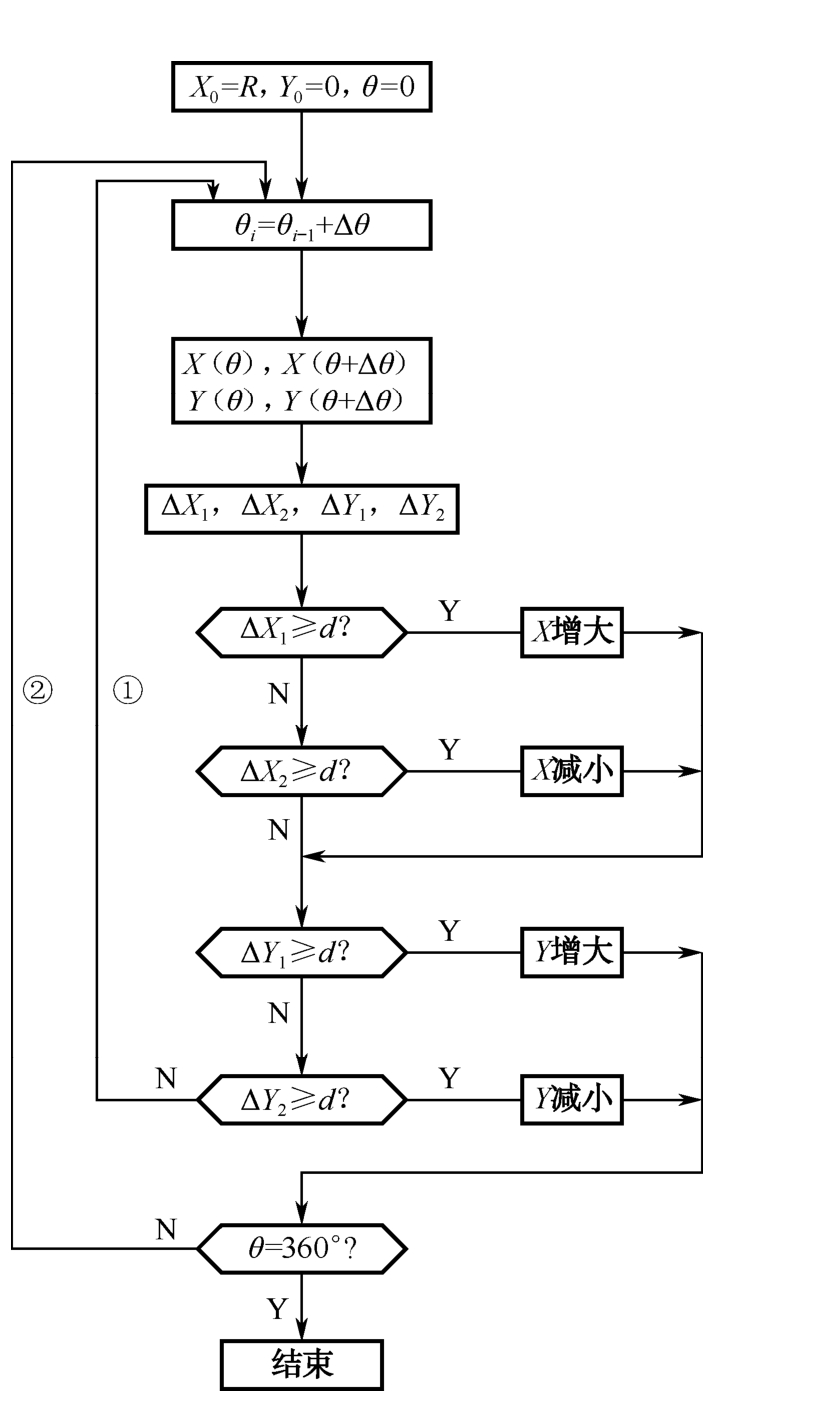
图1-75 圆的轨迹控制法算法
(1)进行初始化处理,设定坐标的初始值,清θ,在图中假定起点为A,则坐标初始值为X=R,Y=0,θ=0。
(2)根据精度要求,设定X、Y方向上的单位位移量,位移量以脉冲当量的整数倍为宜,单位位移量是X轴和Y轴每次移动的量,它的大小决定曲线轨迹与参数方程的曲线之间的误差,这个误差不会大于单位位移量。
(3)设定参数θ的增量Δθ,增量Δθ的大小设置为每一次增加Δθ后都不能使ΔX 或ΔY 的增量大于单位位移量,即
ΔX 1 =X(θ+Δθ)-X(θ)(X轴增大方向)
ΔX 2 =X(θ)-X(θ+Δθ)(X轴减小方向)
ΔY 1 =Y(θ+Δθ)-Y(θ)(Y轴增大方向)
ΔY 2 =Y(θ)-Y(θ+Δθ)(Y轴减小方向)
都必须小于(最多等于)单位位移量。
(4)参数θ在当前位置上增加Δθ,那么θ i =θ i-1 +Δθ,然后根据参数方程式分别计算X i ,Y i 的值,即
(5)分四次计算ΔX与ΔY的值,即
ΔX 1 =X i -X i-1 ΔX 2 =X i-1 -X i
ΔY 1 =Y i -Y i-1 ΔY 2 =Y i-1 -Y i
(6)每一次计算值都必须与单位位移量进行比较,只要结果是大于或等于单位位移量就发出定位指令,使X轴或Y轴在增加方向或减小方向上运行一个单位位移量,位移后的X或Y的值为新的位差值X i-1 或Y i-1 。
(7)如果四次比较都小于单位位移量,则参数θ再次增加一个Δθ,重复(4)、(5)、(6)步,如图1-75中的①所示。
(8)如果四次比较产生X或Y方向上的位移时,在移动后必须判断是否到达终点(θ=360°),到达终点则结束,未到达终点则参数θ再次增加Δθ,重复(4)、(5)、(6)步,如图1-75中的②所示。
由上述分析可知,这种方法其本质上是用一小段一小段平行于X轴和Y轴的微小直线来近似代替圆参数方程曲线的。只要这个近似在实际应用中能够满足精度要求就可以运用。所谓联动仍然是单轴运动,在一定时间内只有一根轴在运动。两根轴的运动是通过PLC的程序来进行协调的。
轨迹控制法对PLC的运算能力和运算速度都提出了较高的要求,例如,如果PLC不具备浮点数运算能力,就没有相关的函数运算指令,这种方法也就不能得到实现。同样,如果PLC的运算速度较低,则程序运行时间很长,效率会很低,这种方法也不会得到应用。