
下载掌阅APP,畅读海量书库
立即打开



定位控制中,除了上面所讲的关于电子齿轮比、脉冲当量的计算外,不同的控制要求还涉及其他方面的一些计算。对于初学者来说,往往会忽略这些计算或不知如何进行计算。这一节对这些常用计算及其方法进行介绍。
下面以图1-34所示的工况来说明所涉及的一些参数和它们之间的关系。
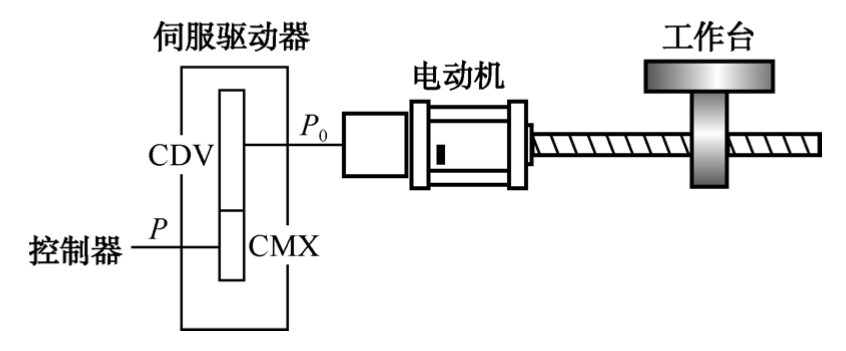
图1-34 伺服工况示意图
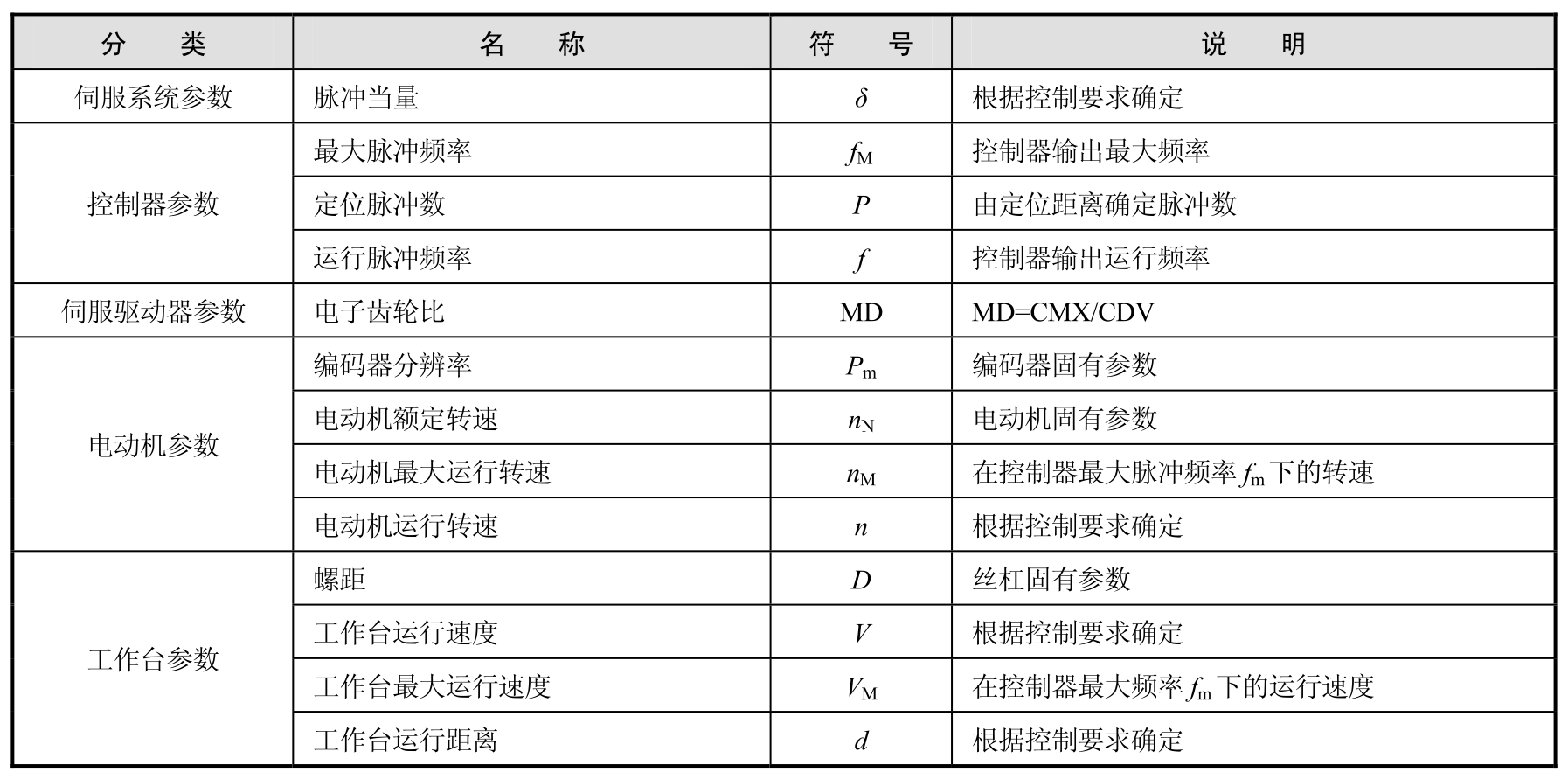
表1-1列出了定位控制各部分的参数名称、符号和说明。
表1-1 定位控制各部分的参数表
对控制器来说,应用定位指令时必须决定定位脉冲数和定位运行频率f。其关系式为:

对电动机来说,其运行转速n为:

对工作台来说,其移动速度V为:

电子齿轮比可以调节脉冲当量,同时也可以调节电动机转速,但这两方面是矛盾的。下面通过一个例子进行说明。
【例1-17】 如图1-34所示,电动机的额定转速n N =3000r/min,PLC最大输出频率为100kHz,丝杠螺距D=10mm,编码器分辨率P m =4096:
(1)要求系统脉冲当量δ=1μm/pls,试设置电子齿轮比。
由【例1-6】计算得到,系统的固有脉冲当量δ 0 为
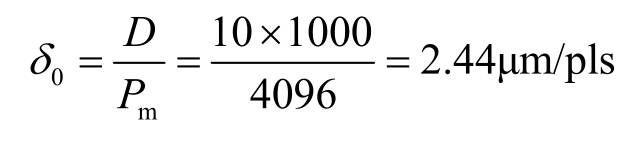
则:
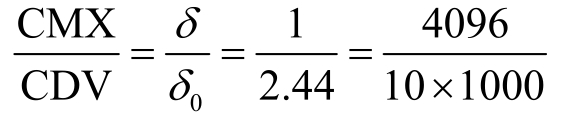
脉冲当量由2.44μm/pls提高到1μm/pls,分辨率提高了,加工精度也提高了。
调节脉冲当量的同时还必须核算一下电动机的转速,因为伺服电动机都有一定的额定转速,在本例中为3000r/min,在运行中,当PLC输出最大脉冲频率时,电动机的转速是不能超过其额定转速的,如超过,则必须计算出PLC在实际应用中所能够输出的最高频率,供定位程序参考。
电动机的最大转速n M 由计算公式(1-3)代入有:

未超出其额定转速n N =3000r/min.
应用中有时候还需要知道工作台移动的速度是多少,可用公式(1-4)代入计算工作台最大移动速度V M 。
V M =f M δ×60=100 000×60×1μm=600cm/min
工作台最大移动速度为每分钟600cm。
(2)如果希望电动机工作在额定转速,试设定电子齿轮比。
由【例1-14】得电子齿轮比设置为:CMX=2048,CDV=1000。核算一下这时系统的脉冲当量δ是多少,以供定位指令设定输出脉冲时使用。

脉冲当量由1mm变为5mm时分辨率变大了,定位精度降低了。
【例1-18】 如图1-30所示,电动机的额定转速n N =2000r/min,PLC最大输出频率为100kHz,减速比K=4,螺距D=10mm,编码器分辨率Pm=8192,希望系统脉冲当量为1μm/pls,试设置电子齿轮比。
对电动机的最大转速进行核算:

n M 大于电动机额定转速2000r/min。这时,如果PLC仍然输出最大频率,则电动机转速超限,所以在实际应用中必须对脉冲输出的最高频率进行限制。应用中最高输出脉冲频率f m 为

在上例中,未超出其额定转速,所以在应用指令时,输出频率不受限制。而本例中已超出其额定转速,所以在应用定位指令编写程序时,输出脉冲的频率不能超过83.3kHz。
工作台移动的最大速度为:
V M =f M δ×60=83 300×60×1=500cm/min
工作台移动的最大速度是每分钟500cm。
【例1-19】 已知伺服电动机的额定转速n N =2000r/min,PLC最大输出频率为100kHz,编码器分辨率m=262 144,滚珠丝杠的螺距D=8mm,伺服系统要求工件在2s里完成40cm行程。试设计完成上述要求定位指令的电子齿轮比、输出脉冲频率和输出脉冲个数。
该题并没有对脉冲当量提出要求,对工件运行速度提出要求实际上是对电动机转速提出要求。因此,电子齿轮比应由电动机转速确定。
工件速度:
电动机转速:
未超过电动机额定转速。电子齿轮比的设置余地比较大,在满足工件速度要求的前提下,尽量使脉冲当量小,以提高定位精度。
观察下面公式,在式(1-5)中,系统的固有脉冲当量为常数,而脉冲当量δ则随着电子齿轮比值的减小而减小。而在式(1-6)中,当电动机转速n一定时,脉冲频率越大,电子齿轮比越小,脉冲当量δ也越小。

因此,把控制器的脉冲输出频率选为其最大输出频率100kHz,f=f M 代入式(1-6),有:
电子齿轮比的设置为:CMX=65 536,CDV=1000。
脉冲当量δ为:

控制器的输出脉冲数P为:
故定位指令的输出脉冲数为200 000pls,脉冲输出频率为100kHz。
通过上面的三个例题,对于电子齿轮比的设置和定位程序中指令脉冲的数量和频率选择有如下建议。
(1)如果控制要求以定位精度为主要考虑,则应根据脉冲当量来设置电子齿轮比。电子齿轮比设置后,应该核算电动机转速和工件位移速度,如果电动机转速不超过其额定转速就选择控制器最大输出频率为指令脉冲的频率。指令脉冲数则根据相应位移距离计算。如果电动机转速超过其额定转速,则还要进一步核算其运行时的最高输出频率,而指令脉冲的输出频率必须小于这个最高频率。
(2)如果控制要求以提高电动机功效为主要考虑,则应以电动机额定转速为依据来设置电子齿轮比。这时,为了最大限度地提高定位精度,则应选择控制器最大输出频率为指令脉冲的脉冲频率,并以此核算系统脉冲当量,计算出指令脉冲的输出脉冲数。