
下载掌阅APP,畅读海量书库
立即打开



卫星激光测距(SLR)始于1964年NASA的Beacon-B卫星的跟踪试验,随后激光测距技术不断发展,测量精度得到了大幅提升(从早期数米的精度水平提升至目前几个毫米的水平),并且越来越多的卫星安装有激光反射镜进行激光测卫,国际已经有超过40个激光测控站用于开展卫星激光测距。激光测距技术发展至今经历了近50个年头,除通常的激光测卫外,还应用于测月。激光测距资料的积累对天文地球动力学、地月科学、月球物理学和引力理论等诸多学科的研究有着重要的价值。
光在真空中的传播速度是恒定的,通过测量激光发射与接收时刻的差异即可精确测量两者之间的距离,称为激光测距。根据激光传播时间测量方式的不同,激光测距可以分为相位激光测距和脉冲激光测距两种方式。相位激光测距仪是用无线电频段的频率,对激光束进行幅度调制并测定调制光往返一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。但是,实际测量中,相位变化的整周期数无法确定,因此存在模糊度问题。脉冲激光测距的原理是:测距仪发出激光束,经测量目标发射后再由测距仪接收,简言之,脉冲测距通过记录激光的往返光行时实现测距测量。激光脉冲的往返传播时间由距离计数器测量。距离计数器的开门信号为激光主波采样信号,对应的关门信号为激光回波信号。激光脉冲往返传播时间可根据距离计数器在开门、关门信号之间的计数值求得。脉冲激光测量的典型波长为532nm,当激光脉冲通过望远镜发出并被反射镜反射,最终由望远镜接收反射脉冲,高速光电探测器可以在 20ps 的时间精度内进行计数,折合为单程精度约为3mm。
图3.4为相位激光测距的基本原理图,本质是测量激光发射与接收时刻的相位差,再通过波长将相差转换为距离,最后结合模糊度,获取激光往返的距离。相位式激光测距仪一般应用在精密测距中,其精度一般可达毫米量级。
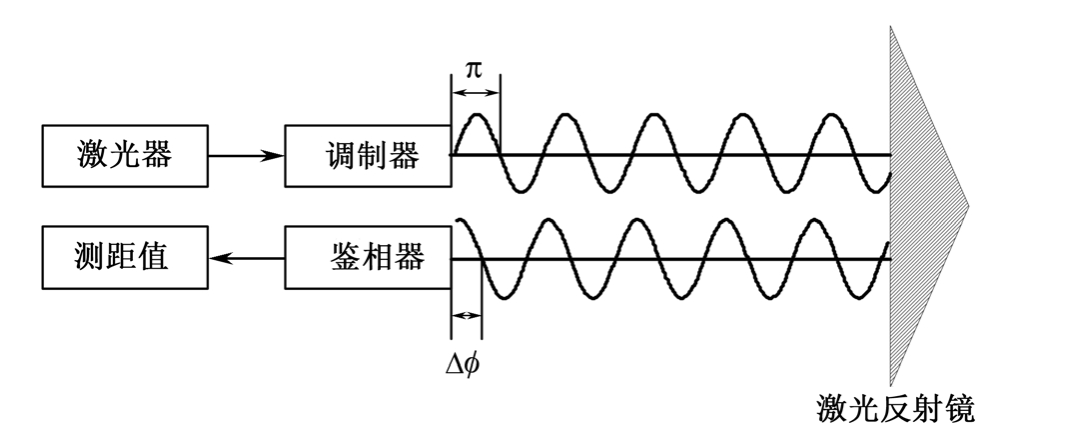
图3.4 相位激光测距原理图
在SLR测量中,为了减少散射引入的误差,通常使用标准点数据(Normal Point Data),就是对一定时间范围内的多个测距值进行平均,这使得 SLR 的均方根差(RMS)值降低约4倍。
影响激光测距精度的误差因素有:脉冲式激光测距测量的是往返光行时,与计数器的时间分辨率相关,如果计数器的计时误差为Δτ,那么其测量误差为c·Δτ;激光脉冲前沿具有一定的宽度,计数器开关触发点的位置变化也将引入测距误差,不同触发方式引入的误差也不同;由于激光脉冲在空间传播过程的衰减与畸变,导致接收到光脉冲与发射的光脉冲在幅度和形状上不一致,给严格确定脉冲到达时刻带来困难,由此引起的误差称为漂移误差;光波穿过大气层时,大气折射也将影响其传输的路径,从而引入误差。