
下载掌阅APP,畅读海量书库
立即打开



无线电测量系统的发展可以追溯至二战时期,当时为了跟踪、测量火箭及飞机等,出现了简易的多普勒测速定位系统和 S 频段圆锥扫描自动跟踪雷达。20 世纪50年代,单脉冲精密跟踪测量雷达、精密干涉仪研制成功,60年代出现了相控阵雷达与统一S频段(USB)系统。早期的测控系统对空间飞行试验任务进行跟踪测轨、遥测与遥控的设备是相互分离的,因此又称为分离式测控系统。分离式测控系统体积庞大、集成度低,不利于测控任务的实施。美国在1958年建立的载人航天测控网也属于分离式测控系统,该系统采用多种频段的设备,导致飞船上的设备复杂、负荷大、兼容性不强。针对这些问题,美国喷气推进实验室在20世纪60年代初开展了统一测控系统的研究,提出了统一 S 频段系统的概念,使其测控系统在1966年发生阶段性的飞跃。
相比于早期的分离式测控系统,USB 系统具有以下显著的特点:(1)采用统一的载波,将跟踪测轨、遥测、遥控、电视语音信号通过多个副载波形式调制在主载波上,用频分实现测控与通信的统一,避免了多个分离式设备带来的兼容性问题,简化了地面设备的操作与维护;(2)载波使用S频段,有利于提高测量精度,满足多个副载波调制带宽的要求;(3)采用伪随机码测距技术,解决了远距离测量的模糊度问题。USB 测量技术的诸多优点使其迅速在空间测控领域得到了广泛使用。1979年,世界无线电管理会议决定以S频段作为空间业务频段,以促进USB技术的发展。后来 USB 技术被进一步纳入国际空间数据咨询委员会标准,为国际大多数航天国家所接受 [1] 。
ⅤLBⅠ是20世纪60年代后期发展起来的射电干涉技术,是一种重要的射电天文技术。它采用无线电干涉法,将多个距离数百乃至数千千米长度基线两端的口径相对较小的射电望远镜合成为巨大的综合孔径望远镜,其最大等效直径为望远镜之间的最大基线长度。ⅤLBⅠ通过延长基线和提高观测频率可获得极高的空间分辨率和基线测量精度。ⅤLBⅠ是目前角分辨率最高的天文观测技术,可获取优于亚毫角秒量级的极高分辨率。
我国在20世纪60年代建立了最初的航天测控系统,包括卫星测控中心与7个测控站,实现了从无至有的突破,完成了我国第一颗人造地球卫星——“东方红一号”的跟踪测轨任务。中国航天测控网的概念在20世纪70年代提出,根据当时我国国情,专家提出测控网的建设需要满足测控设备布局适应多场区、多射向、多弹道飞行试验特点和不同发射倾角、不同运行轨道卫星测控要求,最终在已有的测控、通信能力的基础上,逐步建成一个布局合理、适应性强的航天测控网。20世纪90年代初,为适应载人航天任务的特殊需求,我国开始建设新一代航天测控网,逐步建立了陆、海基统一S频段测控网 [2] 。
我国陆基测控网由分布于国内外的数十个测控站组成,采用的跟踪测量设备主要包括光学测量系统、脉冲雷达测量系统、连续波干涉仪测量系统和统一S频段测控系统。陆基测控网对空间目标的观测包括距离测量、距离变率测量及角度测量。海基测控网由多艘远洋测量船构成,目前服役的有4艘测量船。测量船采用的跟踪测量设备主要为统一S频段测控系统,包括距离、距离变率及角度测量等观测类型。不同于陆基测量信息,测量船所测量的被测目标是在动态条件下完成的,设备的位置与姿态处于不断变化中,必须在测量设备跟踪被测目标的同时,对船的位置与姿态进行同步测量,测量数据的使用需要进行船位与船姿的修正。受限于目前的测控现状和境外布站的局限,测量船在未来一段时期内仍将发挥不可替代的作用。
随着探月工程的逐步深入,我国将不断加快深空测控网的建设步伐。我国深空测控网将由3个深空测控站和1个深空探测任务中心组成。按照计划,我国深空网在2012年初步建成2个国内站,2016年完成国外站部分的建设。2个国内站中喀什站天线口径为 35 米,具备 S/X 频段的测控能力;佳木斯站测控天线口径为 66米,具备S、X和Ka三个频段功能的测控能力。同时,我国将在南美建设第三个拥有大口径天线的深空测控站。值得指出的是,2012 年,我国深空测控站在测试阶段就进行了“嫦娥二号”小行星探测试验的测控任务,为小行星的飞越、拍照成像提供了有力的支持。这三个深空测控站构成的三站联网的深空探测网,将用于支持我国将来的载人登月、火星探测和其他深空探测任务。
中国科学院建有的ⅤLBⅠ网(CⅤN)主要用于天文测量,该测控网包括上海天马(65m)、北京(50m)、昆明(40m)、乌鲁木齐(25m)4 个测站和位于上海的数据处理中心。该测控网组网工作时相当于综合口径为3000多千米的巨大望远镜,具有极高的角分辨率。在我国探月工程中,ⅤLBⅠ网与中国航天测控网共同配合完成了月球卫星的测定轨工作 [3] 。
距离测量是指利用无线电波在空间以恒速、直线传播的特性的测量方式,测量航天器与测站之间的相对距离。连续波雷达测距通过一定形式的测距信号对发射载波进行调制,并发射上行载波,卫星应答机接收并锁住上行载波,并转发返回至地面测站,地面接收机将调制的测距信号与发射信号进行时间差或是相位差比较,提取距离信息。测距信号通常包括3种:侧音信号、伪随机码信号和音码混合信号。
根据通信系统的上行链路和下行链路的结构和类型可以将台站对航天器的跟踪划分为单程、双程和三程模式。单程模式是星载晶振产生下行信号,由地面台站接收跟踪信号,这种模式只有下行链路;双程模式是由地面台站向探测器发射上行信号,星上转发器接收上行信号,并产生一个相干的下行信号,由地面台站接收;三程模式与双程模式相类似,只是双程上行发射站与下行接收站相同,而三程的接收站与发射站不同。这三种模式中,双程模式是一种闭环跟踪模式,而单程和三程模式是开环跟踪模式,其通信链路两端开放 [4] 。图3.1为单程与三程跟踪模式示意图。在三程测量模式下,上行站与下行站之间的钟差将直接引入测量中,因此站间时间的同步是测控实施中需要解决的一个重要问题。
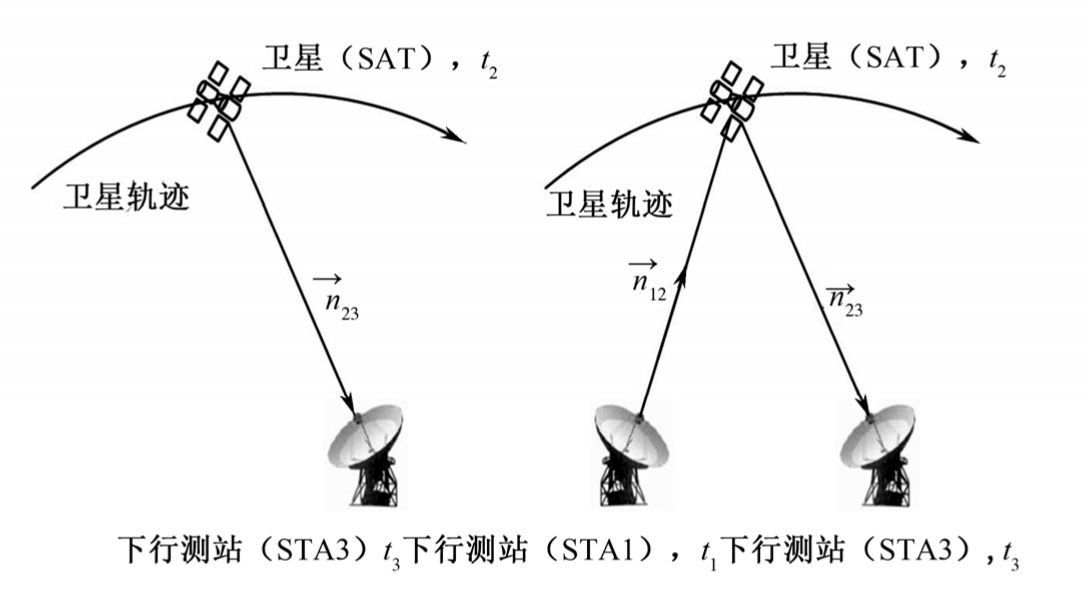
图3.1 单程与三程跟踪模式示意图
侧音测距是指从地面测站发射一组纯音信号(通常为正弦波),依次对上行载波进行调相,经上行调制后的纯音分布在载波的两侧,将其发射至航天器。星载应答机将接收到的上行侧音信号转发回地面测站。地面测站对接收到的信号进行调相解调恢复出侧音信号后,通过比较上行侧音信号与恢复出来的侧音信号之间的相位差,可计算出反映航天器与地面测站的距离信息。图3.2为测音测距原理示意图。侧音测距具有测距精度高、捕获时间短和设备简单的优点,其缺点是需要多次进行模糊度解算,因而侧音测距通常应用于近地航天器的测轨跟踪。
伪随机码测距利用伪随机码信号的自相关特性进行测距测量,采用伪随机码容易获得长周期特性,使无模糊距离增大,可以避免多次解距离模糊的复杂问题,且保密性和抗干扰性得以增强,同时调制载波后尚可以和多种信号同时占用一个射频带宽。基本原理为:测站码产生器生成伪随机码,一组发送至码移位寄存器进行寄存,并产生“1”信号,距离计数器开始计数,另一组调制至载波信号发射至目标,经应答机转发由地面站接收,恢复并经过相关处理使得本地码与接收码完全同步,在接收端产生一个与发送码完全相同而相对于发送码有一定延迟的本地码。通过比较本地码与移位寄存器中的发送码状态,产生收全“1”关门信号,使距离计数器关门,测量时延值即可转换为距离测量量。
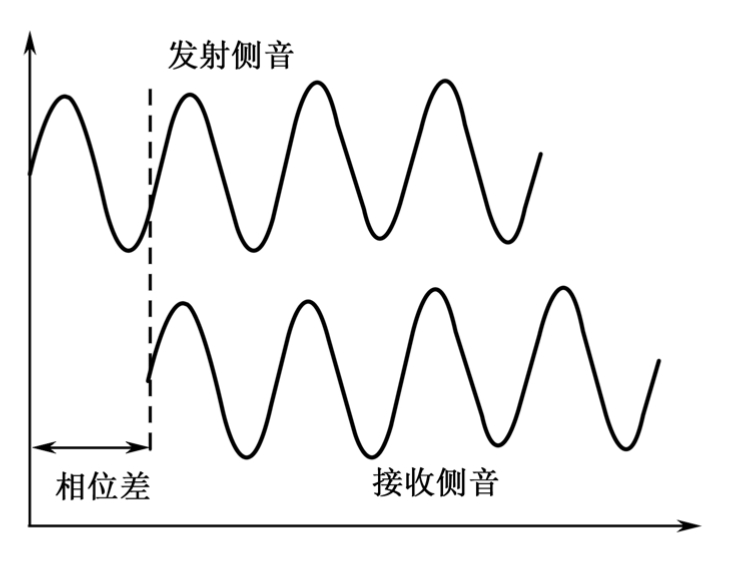
图3.2 侧音测距原理示意图
音码混合测距过程为:由地面测控终端产生一组伪随机码序列,并调制到载波发送至卫星上,卫星接收到这一伪随机码序列,用伪码的时钟产生一系列同步的测距音(即测距音的零相位对应于伪码的开始位置,在一个码周期内有多个整测距音周期),这些测距音通过相位调制发送到地面,经相位延迟锁定后通过测距音/伪码相位比较器得出测距音与最初发送的伪码的相位差或时延,进而得出所测距离。
影响测距测量精度的因素有多方面的,如设备热噪声、不稳定的频率源、设备零值的校准、设备终端分辨率及介质传播过程中引入的误差(介质传播的影响可以通过模型参数进行标校,这将在本章 3.6 节进行详细阐述。)这些因素对测距的影响主要分为系统性偏差与随机噪声。
通常多普勒测量直接测量的是频率,但是轨道计算中通常转换为视向速度(或是距离变化率)。根据测量模式的不同,多普勒测量同样可以分为单向、双向及三向测量。单向测速系统一般由航天器上的信标机和地面接收设备组成。星载高稳频率振荡器产生下行信号,由地面测站接收,地面测站接收到的信号相对于标称下行发射信号(以地面站高稳频率振荡器为参考)的频率差为多普勒频移。受星载条件的制约,星载频率振荡器的体积及温控能力均会受到影响,因而其稳定度一直不高,直接影响了单向多普勒测量的精度。但是单向多普勒测量简化了地面操作,随着航天级高稳定晶体振荡器生产能力的提高和成本的降低,单向多普勒测量将会得到广泛应用 [5] 。
影响多普勒测量的因素也是多方面的:晶振不稳定性是一个基本误差源,频率的不稳定直接影响视向速度的精度;由测量设备引起的多普勒测量误差,主要来源于信号经过接收机和发射子系统及航天器应答机传输路径中的热噪声和不稳定性。为了减小测量设备的影响,深空测速系统一般采用载波相位计数测量法 [6] 。
ⅤLBⅠ测量的基本原理:两个射电望远镜同时接收同一电磁波源发出的电磁波,对记录的数据通过相关处理得到此电磁波到达两个望远镜的相位差,从相位差中求出到达两个观测站的时间差(简称时延)。
图3.3为ⅤLBⅠ跟踪原理示意图。ⅤLBⅠ以高稳定的氢原子钟信号作为独立频率标准,各观测站的射电望远镜接收无线电信号,将其变换为基频信号后,进行数字化采样,并记录或传输。相关处理机是ⅤLBⅠ的数据预处理核心设备,主要完成数据的格式转换、时间同步、延时补偿、FFT运算、复数交差相乘累加、长期累加,最后输出计算结果,供后处理使用。
在传统的ⅤLBⅠ技术中,观测站获得的海量数字化数据先记录在磁带上,再传送到数据处理中心的相关处理机进行事后相关处理。随着网络传输技术的进步,记录的数据可以通过网络进行准实时传输,准实时处理获取精确时延测量值。
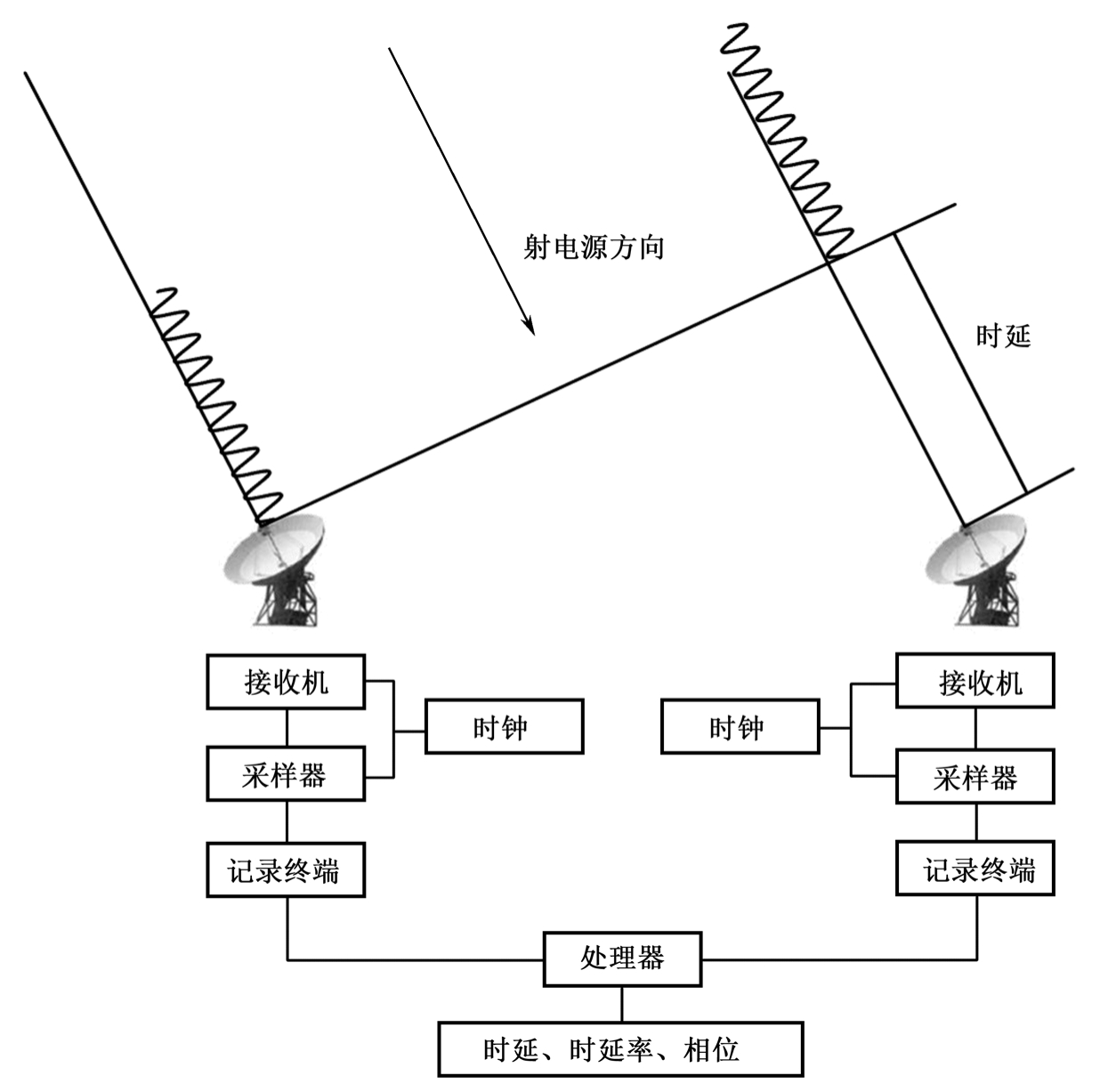
图3.3 ⅤLBⅠ跟踪原理示意图