
下载掌阅APP,畅读海量书库
立即打开




在密集杂波环境下,仿真可以比较改进滤波器后的多假设算法与原多假设算法航迹起始的性能。
在仿真过程中,假设目标探测概率 p d =0.9,虚警概率 p f =0.1,虚警空间探测密度 β f =0.0001。过程噪声分量 q 1 = q 2 =0.04;传感器测距误差 σ r =100m;采样间隔 T =1s。每个周期的杂波是按泊松分布确定的,杂波按均匀分布随机分布在雷达视域范围内。仿真分3个剧情进行,剧情1为稀疏和密集杂波环境下5批目标,目标做匀速直线运动;剧情2为稀疏和密集杂波环境下的2批目标,目标做匀速直线运动且运动航迹相交;剧情3为稀疏和密集杂波环境下的3批目标,目标做圆周运动。
剧情1: 杂波环境下的5批目标航迹起始,目标做匀速直线运动。
目标1的真实初始状态: x 1 0 =[0m 0m 15m/s 10m/s] T ;
目标2的真实初始状态: x 2 0 =[400m 100m 15m/s 10m/s] T ;
目标3的真实初始状态: x 3 0 =[200m 200m 15m/s 10m/s] T ;
目标4的真实初始状态: x 4 0 =[300m 300m 15m/s 10m/s] T ;
目标5的真实初始状态: x 5 0 =[50m 400m 15m/s 10m/s] T 。
距离单位为m,速度单位为m/s,加速度单位为m/s 2 ,采样时间5s,采样间隔 T =1 s。
剧情2: 杂波环境下的2批目标航迹起始,目标做匀速直线运动且运动航迹相交。
目标1的真实初始状态: x 1 0 =[200m 100m 15m/s 10m/s] T ;
目标2的真实初始状态: x 2 0 =[200m 100m 15m/s -10m/s] T 。
距离单位为m,速度单位为m/s,采样时间5s,采样间隔 T =1 s。
剧情3: 杂波环境下的3批目标航迹起始,目标做圆周运动,转弯半径均为50m,角速度为0.3rad。
目标1的真实初始状态: x 1 0 =[80m 80m 15m/s 10m/s] T ;
目标2的真实初始状态: x 2 0 =[300m 300m 15m/s 10m/s] T ;
目标3的真实初始状态: x 3 0 =[400m 50m 15m/s 10m/s] T 。
距离单位为m,速度单位为m/s。采样时间5s,采样间隔 T =1 s。
5批匀速直线运动目标在稀疏和密集杂波下的仿真结果如图2.6~图2.9所示。
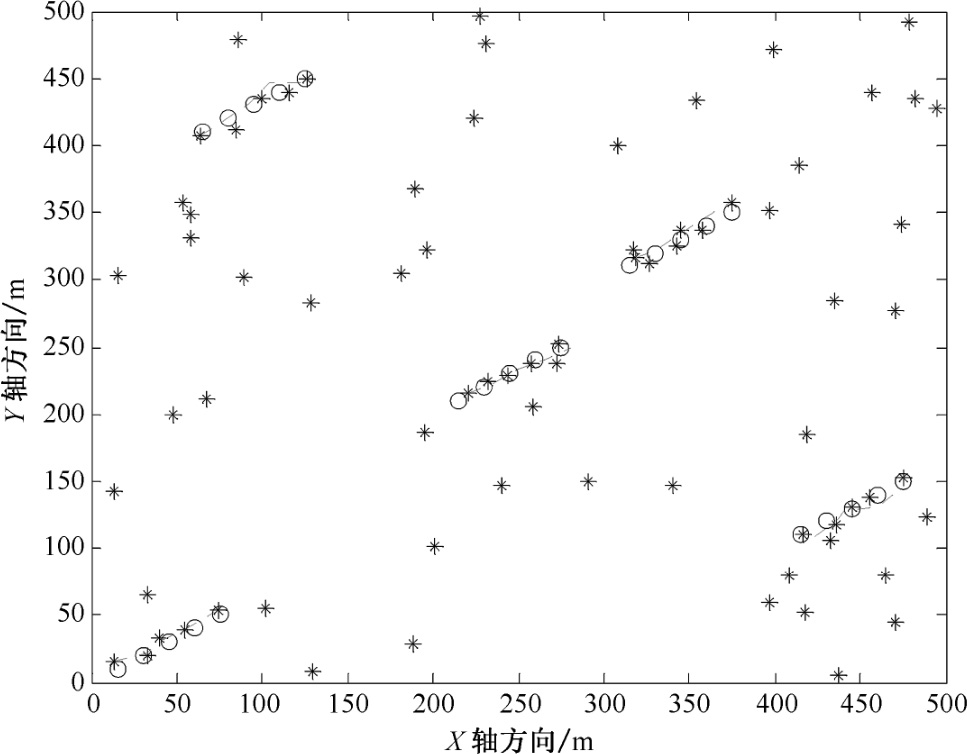
图2.6 稀疏杂波环境下原始MHT航迹起始图
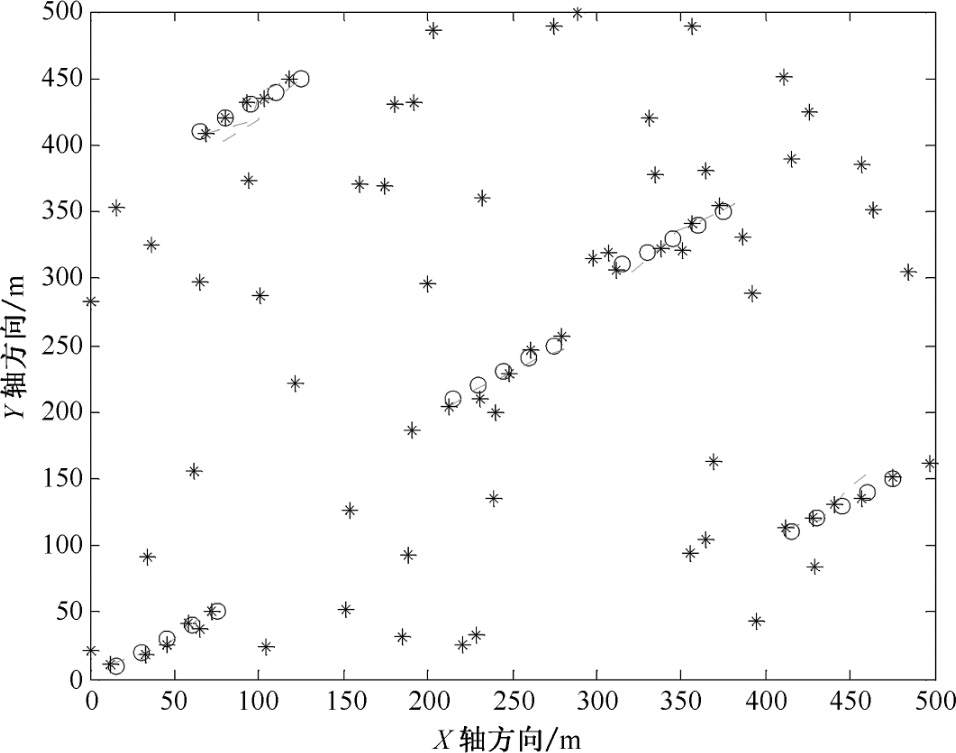
图2.7 稀疏杂波环境下改进MHT航迹起始图
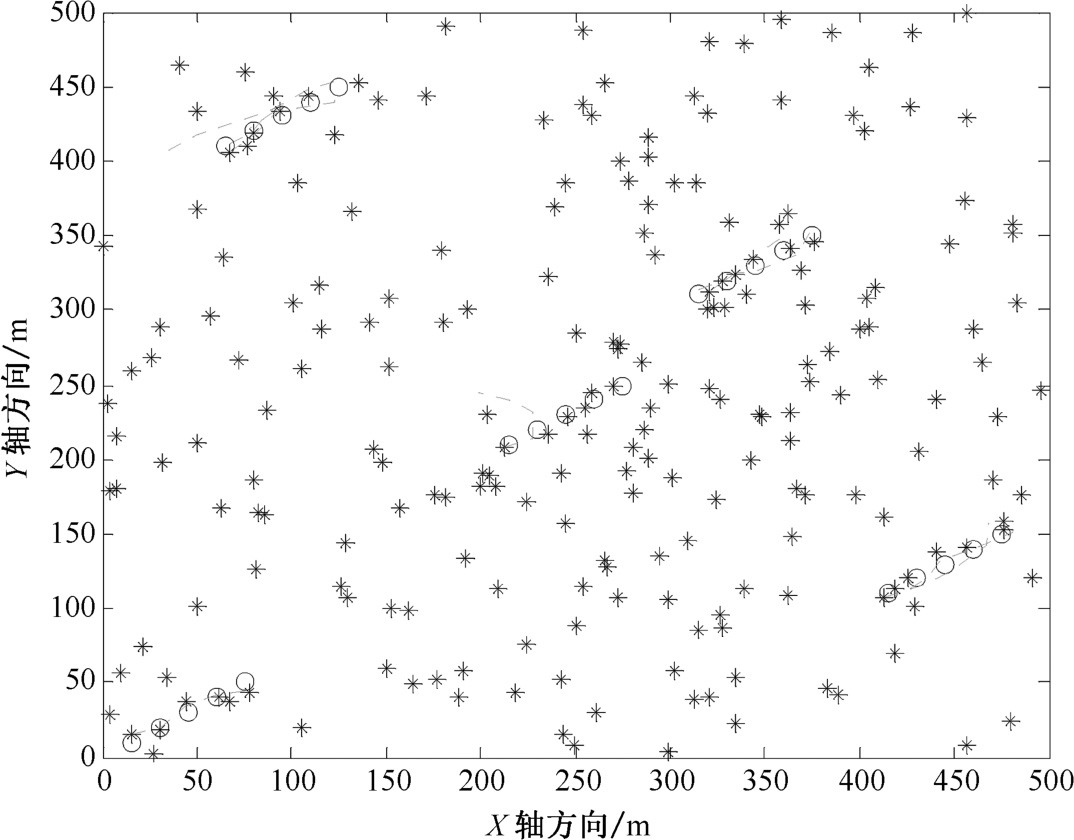
图2.8 密集杂波环境下原始MHT算法航迹起始图
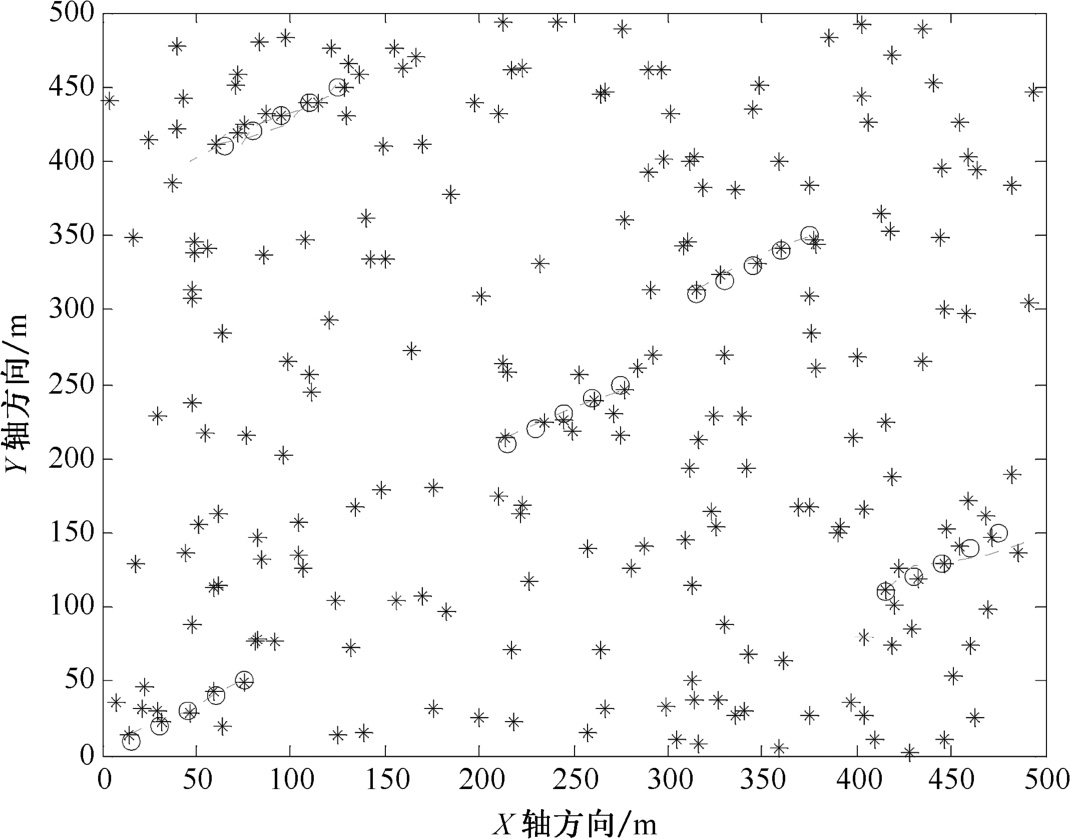
图2.9 密集杂波环境下改进MHT算法航迹起始图
2批交叉目标在稀疏和密集杂波下的仿真结果如图2.10~图2.13所示。
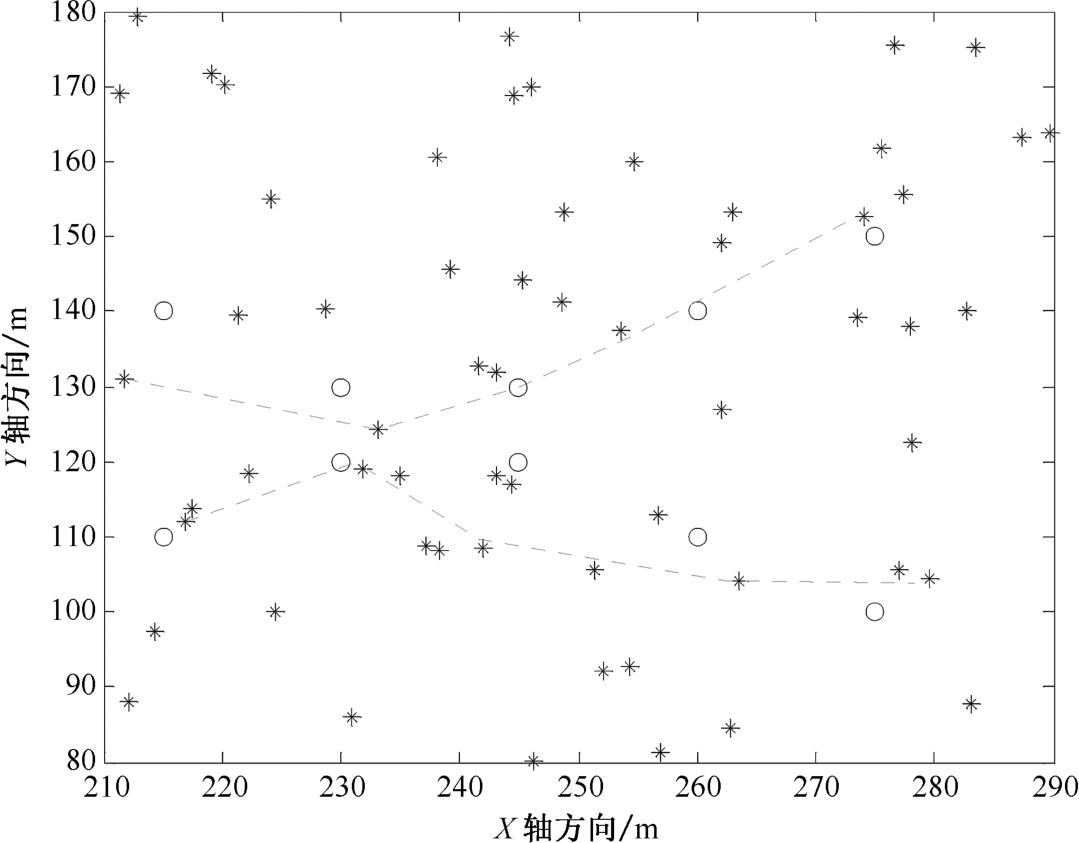
图2.10 稀疏杂波环境下原始MHT算法航迹起始图
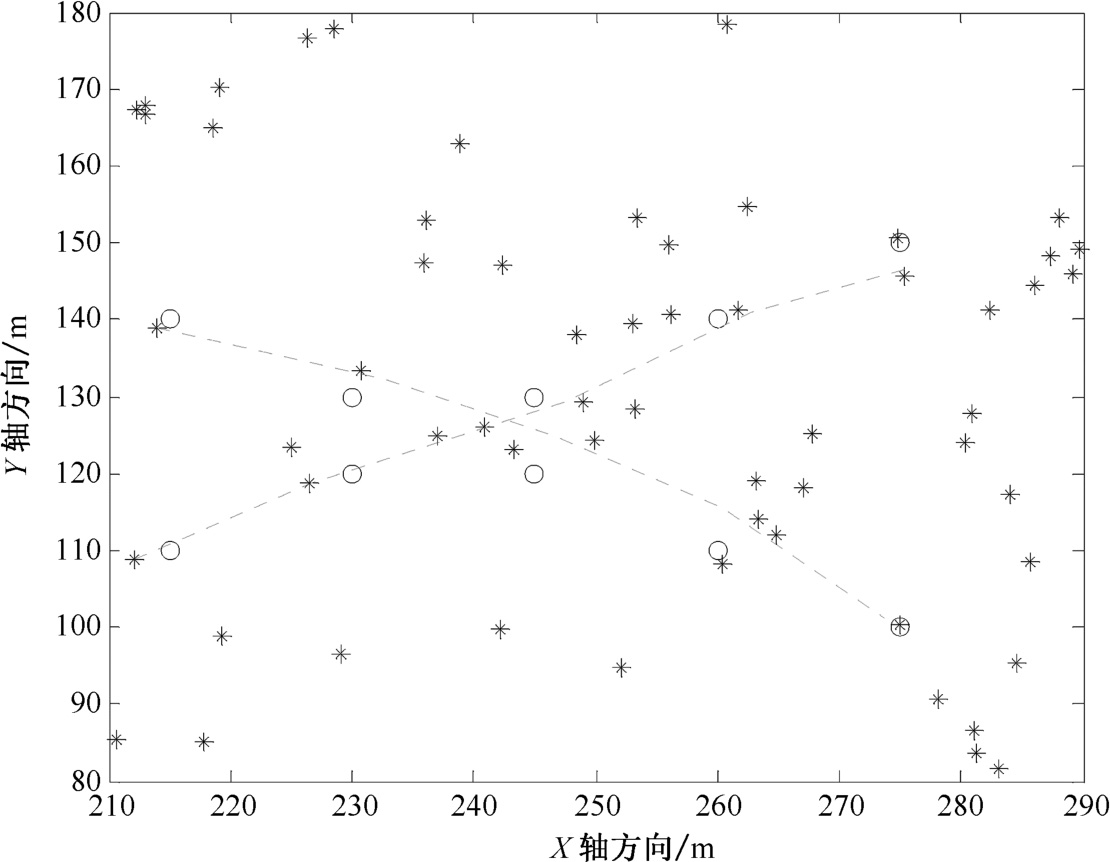
图2.11 稀疏杂波环境下改进MHT算法航迹起始图
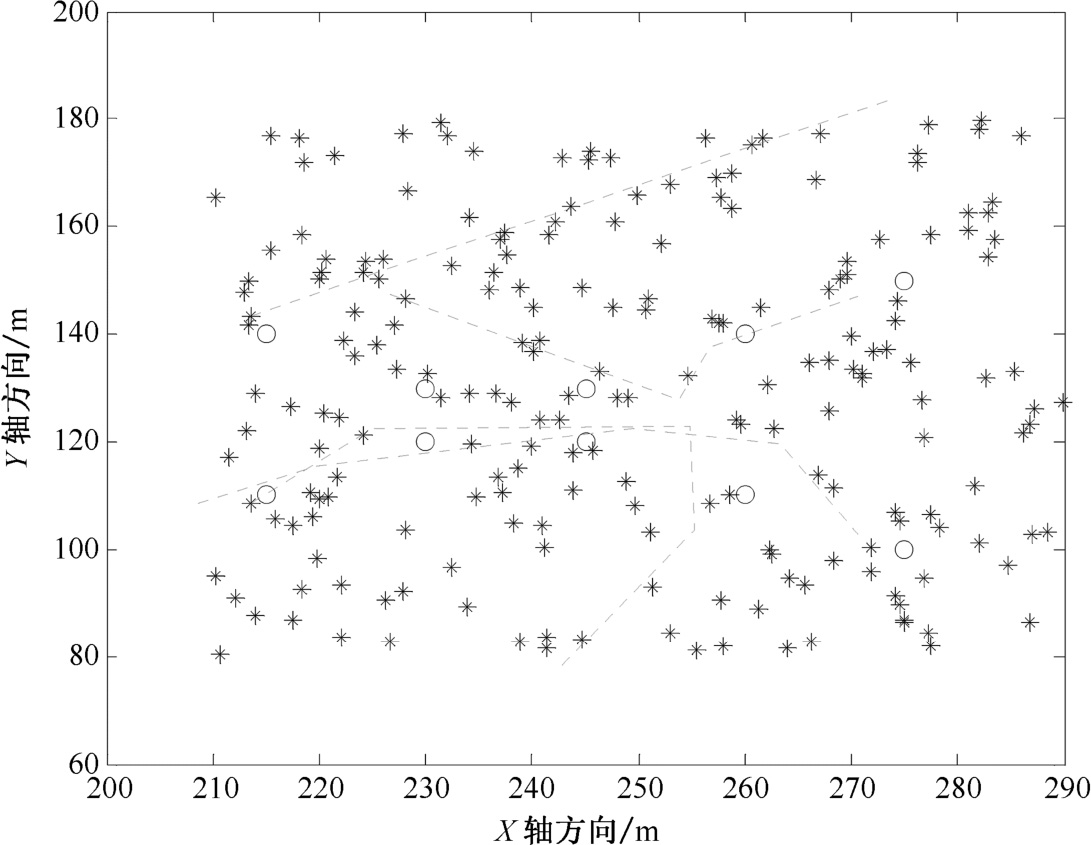
图2.12 密集杂波环境下原始MHT算法航迹起始图
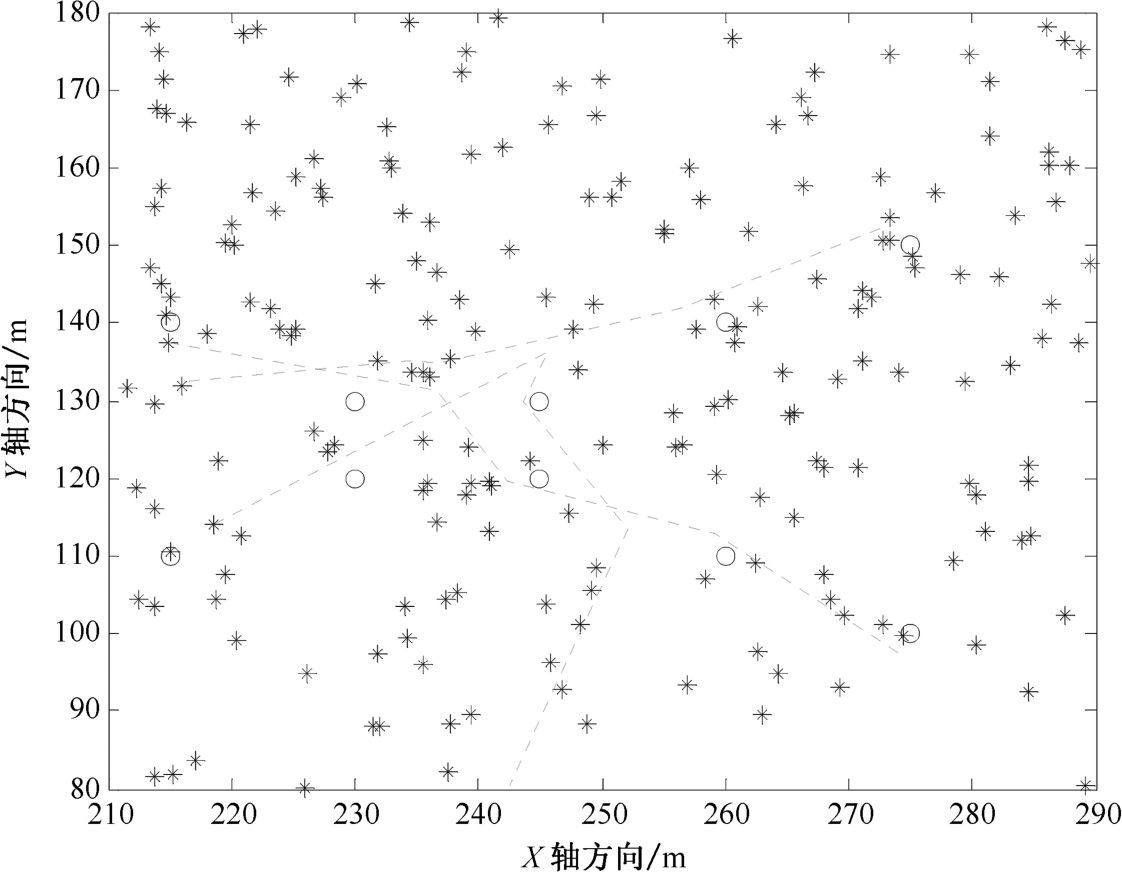
图2.13 密集杂波环境下改进MHT算法航迹起始图
3批圆周运动目标在稀疏和密集杂波下的仿真结果如图2.14~图2.17所示。
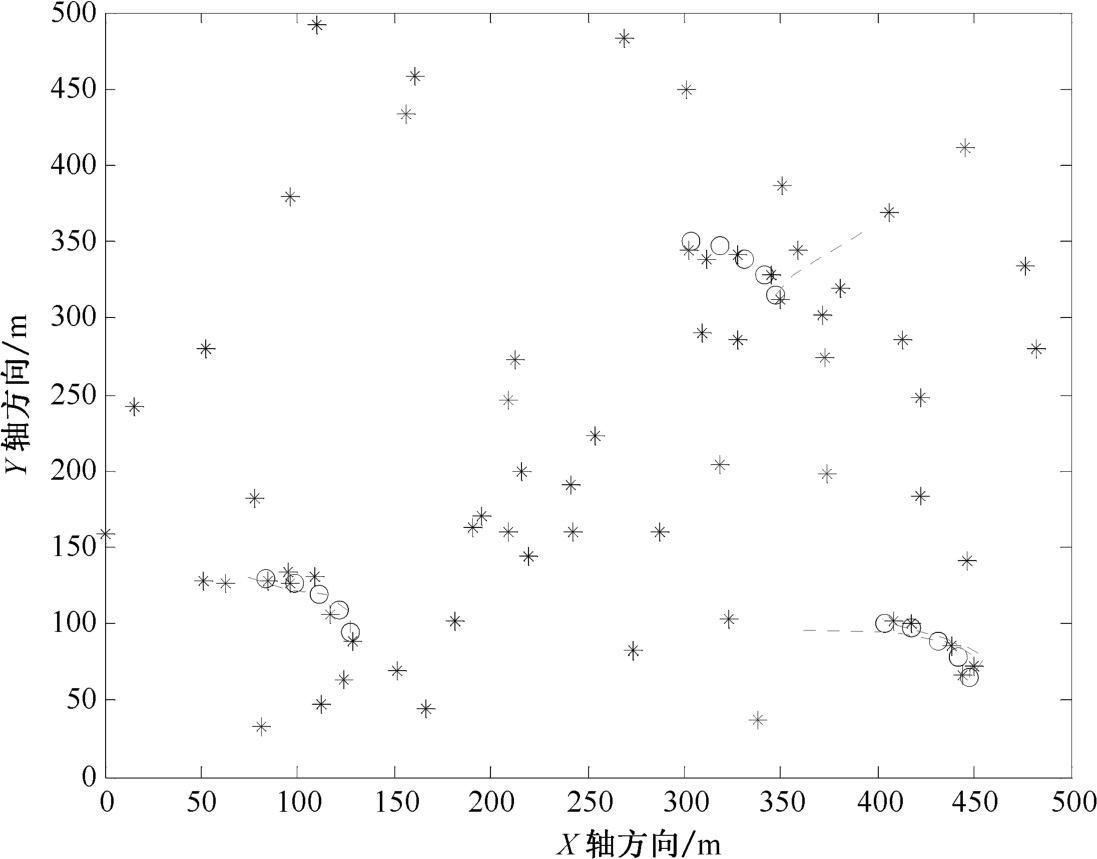
图2.14 稀疏杂波环境下原始MHT算法航迹起始图
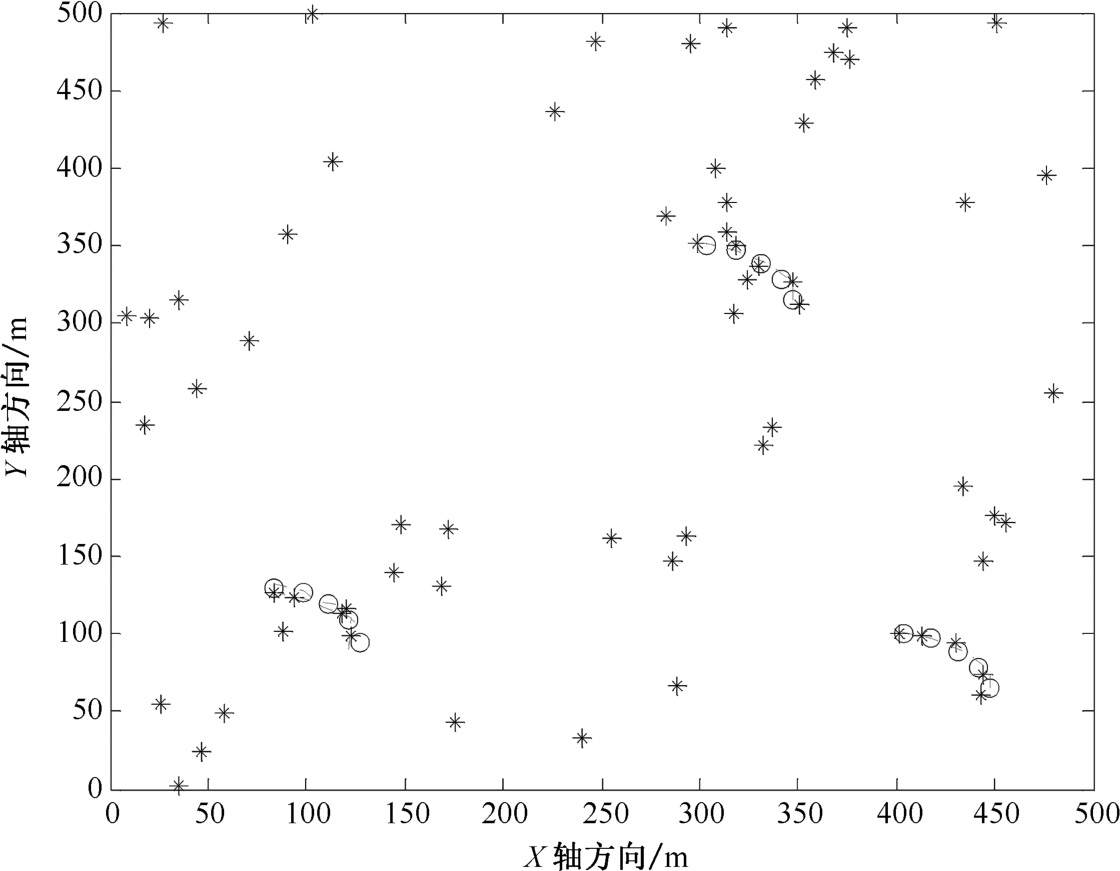
图2.15 稀疏杂波环境下改进MHT算法航迹起始图
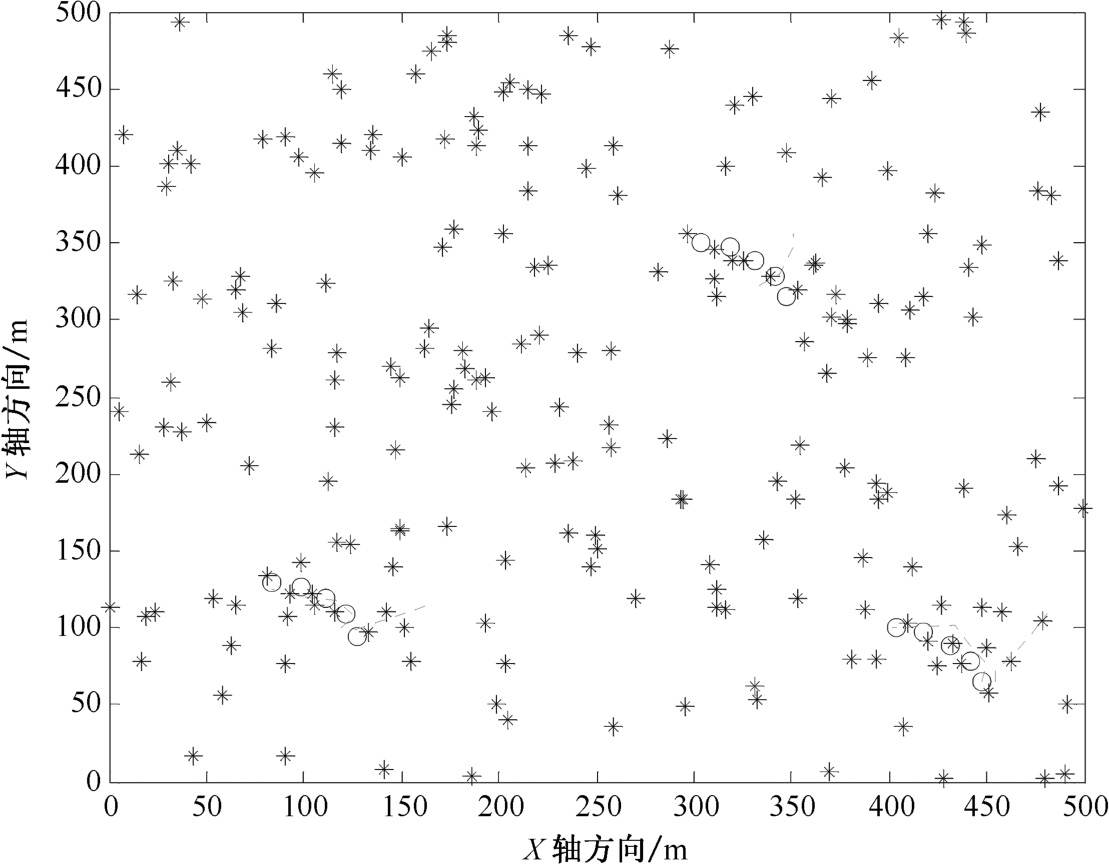
图2.16 密集杂波环境下原始MHT算法航迹起始图
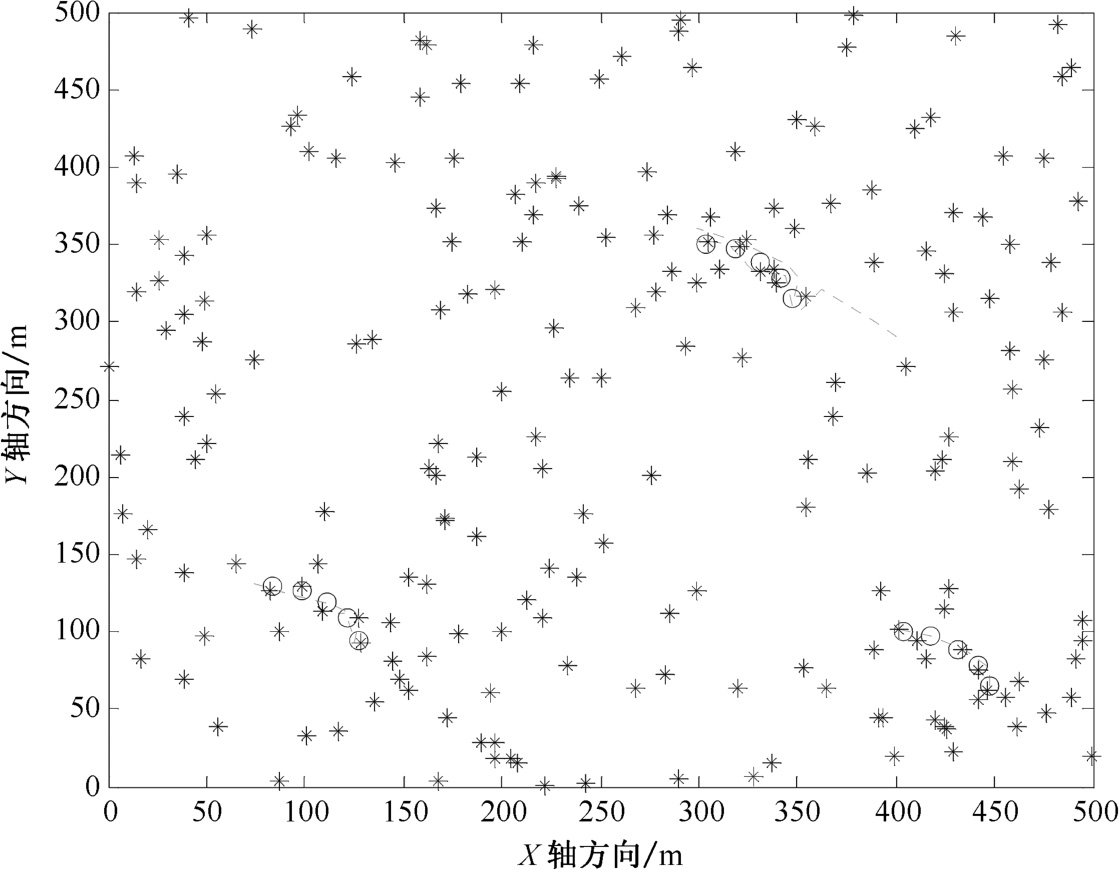
图2.17 密集杂波环境下改进MHT算法航迹起始图
图中小圆圈符号表示目标真实点迹,星符号表示杂波点迹,线条表示起始的目标航迹。从仿真图2.6~图2.9可以看出,对做匀速直线运动的目标:在稀疏杂波环境下,两种算法都能较好地在目标真实位置附近起始出航迹,原始算法起始效果稍微好于改进算法,因为在稀疏杂波环境下,原始算法滤波模型更符合真实目标运动模型;在密集杂波环境下,原始算法起始出了8条航迹,包括3条虚假航迹和1条错误航迹,改进算法起始出了6条航迹,其中只有1条虚假航迹。从仿真结果图2.10~图2.13可以看出,对做匀速直线运动且航迹相交的目标:在稀疏杂波环境下,两种算法都能起始出比较符合目标真实位置的航迹,改进算法效果更好;在密集杂波环境下,原始算法起始出了4条航迹,起始的航迹质量较差,改进算法起始出了3条航迹,其中2条比较符合目标真实航迹。从仿真图2.14~图2.17可以看出,在对机动目标进行航迹起始时,在稀疏杂波环境和密集杂波环境下,原始算法航迹起始的效果都较差,而改进算法航迹起始的效果明显好于原始算法。因为大量的杂波或目标的机动,都会使点迹之间关联变得复杂,导致机动的产生,Kalman滤波器不能很好地适应这种机动情况,而交互式多模型滤波器能较好地适应目标机动情况,所以改进算法在杂波和目标机动情况下的效果要好于原始算法。