
下载掌阅APP,畅读海量书库
立即打开




基于航迹的MHT算法在航迹的更新和预测阶段,使用Kalman滤波器进行工作,滤波器模型和目标运动模式相符合的程度,很大程度上决定了目标航迹起始的性能。由于战场环境的复杂性,需要能实时识别成千上万目标,其中目标信息既包含机动目标和非机动目标,又包含环境混响和虚警,为了能让滤波器在复杂环境中有更好的适应性,对滤波器的设计就显得十分重要。
在机动目标跟踪的研究和实践过程中,人们逐渐认识到使用基于单模型的自适应滤波器进行机动目标跟踪时效果往往并不好,表现为跟踪精度与对目标机动的快速响应之间难以很好地协调,特别是目标的机动能力越来越强,目标运动模式的结构、参数变化都很大,单模型的自适应滤波器难以及时准确地辨识出这些变化,造成模型不准确,从而导致跟踪性能下降。
早在20世纪60年代中期,针对复杂系统的控制问题(如系统故障,传感器或执行器故障,系统参数变化较大),自动控制领域就提出了多模型自适应控制的思想。为此,人们提出借鉴该思想来解决机动目标跟踪问题,即用多个目标状态模型来逼近目标的真实运动模式,其中每个模型对应着一种可能的机动模式,目标的随机机动由模型之间的随机跳变来刻画,再基于多个模型设计出多个滤波器,从而对机动目标实施有效跟踪。因此,机动目标跟踪的多模型算法实质上是多模型自适应控制思想在目标跟踪领域的应用与推广。
在统计估计领域存在两类估计,分别为过程估计和参数估计。若在过程估计的同时还存在参数或结构不确定性,此类问题通常被称为混合估计问题。混合估计问题的系统状态由连续状态和离散状态组成,系统状态仅部分可观,且离散状态间存在着概率转移关系。如果将随机变化的目标运动模式作为离散状态,目标运动状态作为连续状态,则机动目标跟踪问题就是典型的混合估计问题,其形式化描述如下:

式中: x ( k )为 k 时刻的目标状态; m ( k )为该时刻的目标运动模式, m i ( k )≡{ m ( k )≡ i }表示目标 k 时刻的运动模式与模型 i 匹配; p ij 为模型 i , j 之间的转移概率; S 为模型集合。
混合估计问题的传统解决方法是将估计与决策技术相结合,对参数或结构不确定性做出唯一的硬判决,其估计结果通常是两级优化而非全局优化的结果。现在,多模型估计算法已成为混合估计问题的主要解决方法。
多模型机动目标跟踪算法的基本思想是将目标可能的运动模式映射为模型集,集合中的各个模型代表不同的机动模式,利用多个基于不同模型的滤波器并行工作,状态估计输出为各滤波器的状态估计基于贝叶斯推理的数据融合。最小均方误差意义下的最优多模型估计需要考虑所有可能的模式状态序列假设,即

式中:
i
∈{1,2,…,(
N
s
)
k
}为截止
k
时刻的模式状态序列的索引,
N
s
为模型集合中的模型数目;
 i
(
k
|
k
)和
P
i
(
k
|
k
)分别为假设模式状态序列
m
k
与以
i
索引的模型序列
i
(
k
|
k
)和
P
i
(
k
|
k
)分别为假设模式状态序列
m
k
与以
i
索引的模型序列
 匹配条件下的状态估计及其误差协方差阵;
匹配条件下的状态估计及其误差协方差阵;
 为该假设的后验概率;
S
k
为所有可能模型序列的集合;
z
k
为量测序列。
为该假设的后验概率;
S
k
为所有可能模型序列的集合;
z
k
为量测序列。
显然,随着时间的推移,可能模型序列假设的数目将呈指数增长,这使上述最优算法的计算量变得不可接受。因此,各种次优的、采用不同假设管理技术的多模型算法被提出,最具代表性的是静态多模型算法、 n 阶广义伪贝叶斯GPB n 算法和交互多模型IMM算法。
静态多模型算法中多个基于不同目标模型的滤波器独立、并行地工作,目标状态估计为各滤波器状态估计的加权,被认为是第一代多模型算法。
n 阶GPB算法仅考虑最近 n 个时刻的模型序列,模型间并无切换转移关系。IMM算法是由H.A.P.Bolm提出的一种具有很高的性价比的次优多模型算法,算法假设不同模型之间的转移服从已知转移概率的有限态马尔可夫链,其性能优于GPB1,与GPB2非常接近,计算量却仅为GPB2的1/ N s ( N s 为模型数目)。IMM算法也被认为是第一个达到实用水平的多模型估计算法。
1988年,Blom和Bar-Shalom在广义伪贝叶斯算法基础上,提出一种具有马尔可夫转移概率的交互式多模型(Interacting Multiple Model,IMM)算法。这种算法在多模型的基础上考虑多个模型的交互作用,以此得出目标的状态估计。
交互式多模型算法包含了多个滤波器(各自对应着相应的模型)、一个模型概率估计器、一个交互式作用器(在滤波器的输入端)和一个估计混合器(在滤波器的输出端)。多模型通过交互作用跟踪一个目标的机动运动,其中
N
的模型的IMM算法流程如图2.5所示。图中,
 为基于
N
个模型基础之上的状态估计;
为基于
N
个模型基础之上的状态估计;
 为模型
j
的状态估计;
Λ
(
k
)为模型可能性向量;
u
(
k
)为模型概率向量;
为模型
j
的状态估计;
Λ
(
k
)为模型可能性向量;
u
(
k
)为模型概率向量;
 为
k
-1时刻第
j
个滤波器的输出;
为
k
-1时刻第
j
个滤波器的输出;
 交互作用的结果,它作为
k
时刻滤波器
j
的输入;
Z
(
k
)为
k
时刻的量测。
交互作用的结果,它作为
k
时刻滤波器
j
的输入;
Z
(
k
)为
k
时刻的量测。
假设模型概率切换是在马尔可夫链下进行的,那么交互式作用器利用模型概率和模型转移概率来计算每一个滤波器的交互估计。滤波循环的开始端,每个滤波器利用交互式估计和量测数据计算出一个新的估计和模型的可能性,然后,前一时刻的模型概率、模型可能性、模型转移概率被用来计算新的模型概率。那么,总的状态就可以通过新的状态估计以及相应的模型概率计算出来。现将具有 N 个模型的IMM算法从 k -1时刻到 k 时刻的递推整理如下。
(1)状态估计的交互作用。设图2.5中从模型
i
转移到模型
j
的转移概率为
 :
:
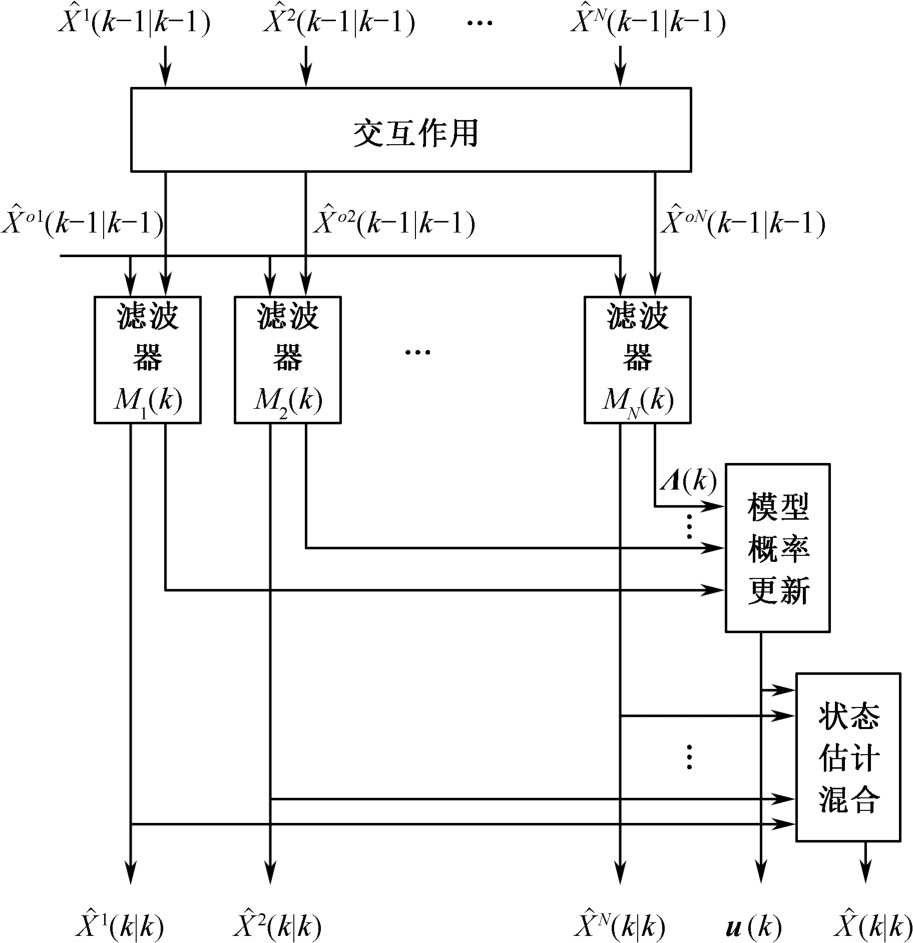
图2.5 IMM算法流程
 为
k
-1时刻的滤波器
j
的状态估计,
P
j
(
k
-1|
k
-1)为相应的状态协方差阵,
u
k
-1
(
j
)为
k
-1时刻模型
j
的概率(
i
,
j
=1,2,…,
r
),则交互计算后
r
个滤波器在
k
时刻的输入如下:
为
k
-1时刻的滤波器
j
的状态估计,
P
j
(
k
-1|
k
-1)为相应的状态协方差阵,
u
k
-1
(
j
)为
k
-1时刻模型
j
的概率(
i
,
j
=1,2,…,
r
),则交互计算后
r
个滤波器在
k
时刻的输入如下:
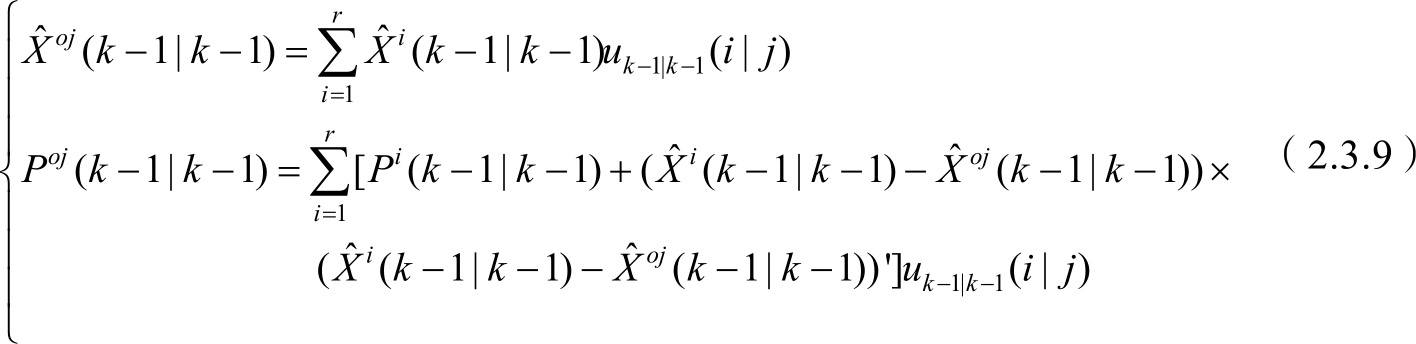
其中:
(2)模型修正。将
 、
P
oj
(
k
-1|
k
-1)作为
k
时刻第
j
个模型的输入,得到相应的滤波器输出为
、
P
oj
(
k
-1|
k
-1)作为
k
时刻第
j
个模型的输入,得到相应的滤波器输出为
 、
P
j
(
k
|
k
)。
、
P
j
(
k
|
k
)。
(3)模型可能性计算。若模型
j
滤波参差为
 ,相应的协方差为
,相应的协方差为
 ,并假定服从高斯分布,那么模型的可能性为
,并假定服从高斯分布,那么模型的可能性为

其中:

(4)模型概率更新。模型的概率更新如下:

其中:
 。
。
(5)估计融合。

整个IMM算法就是利用这一递推过程来完成的。
由交互式多模型的思想及参数的设计可看出,该算法主要存在以下几个方面的问题:
(1)如何选择保持最佳跟踪性能的离散机动水平,它是以较大的计算资源来换取机动性能的提高;
(2)增加模型可以提高精度但计算量增大,且引入模型竞争使性能下降;
(3)算法中用到平行的多个Kalman滤波器,计算量很大;
(4)由于在验前无法获得模型之间的准确转换概率,事先确定模型之间的转换概率导致IMM算法的使用和跟踪精度受限。
针对交互式多模型算法存在的这些问题,研究人员提出了很多改进措施,选择匀速和当前统计模型,作为交互式多模型算法的模型集,取得了较好的效果。本节针对密集杂波环境下目标航迹起始的需要,在多假设航迹起始算法的航迹更新和预测阶段,采用交互式多模型滤波器代替基本的Kalman滤波器,对算法进行了改进。算法中的交互式多模型滤波器也采用匀速和当前统计模型作为模型集,并进一步对模型集中的当前统计模型做了加速度自适应处理,提高了算法航迹起始的性能。
1)模型集的选择
交互式多模型滤波器是用多个模型交互跟踪目标,考虑多个模型的交互作用,如果目标运动不在所选的模型集中则算法精度必然会受到影响。为了让模型集能更好地符合目标的运动,需要尽可能多的包括目标运动模型,但增加模型会使计算量增大,且引入模型竞争也会使性能下降。因此,选择合适的模型集是提高算法性能的关键。
标准的IMM算法是将常用的匀速与匀加速模型交互得到状态估计,研究表明,这种组合对低机动目标的跟踪效果较好,但当目标做高机动运动时就不合适了。当前统计模型采用非零均值和修正的瑞利分布表征目标的机动加速度特性,能更为真实地反映目标机动范围和强度的变化,适合高速机动目标的跟踪,但对低机动目标的跟踪效果较差。将匀速模型和当前统计模型组合成的模型集,可以综合两种模型的优点,具有较好的适应目标的能力,而且模型集数量小能降低计算量提高算法的速度。
对二维匀速直线运动模型,设目标的状态方程为

目标状态向量为
 ;
;
观测矩阵为
状态转移矩阵为
系统扰动矩阵为
对二维当前统计模型,设目标的状态方程为

目标状态向量为
观测矩阵为
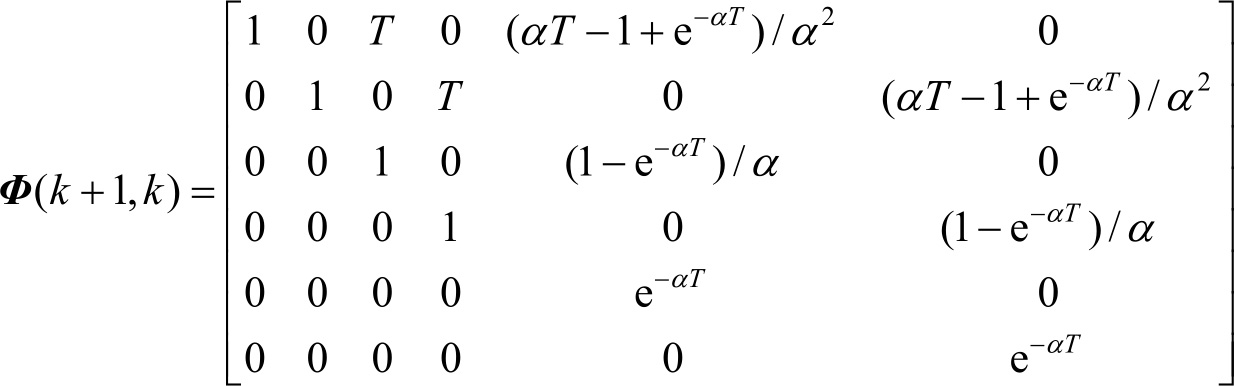
状态转移矩阵为
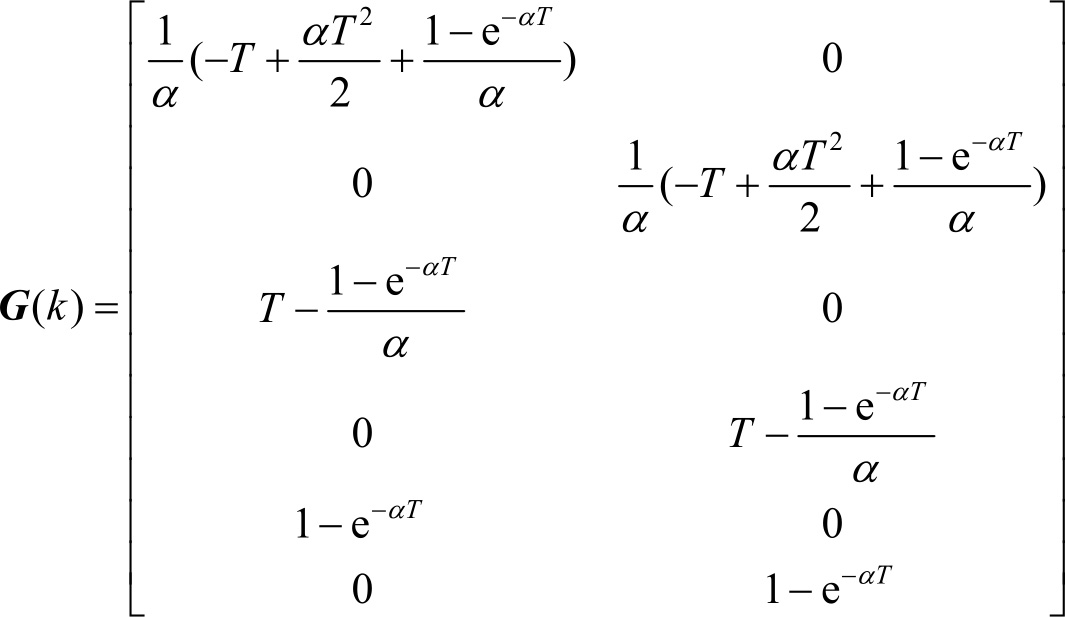
G ( k )为输入控制矩阵:
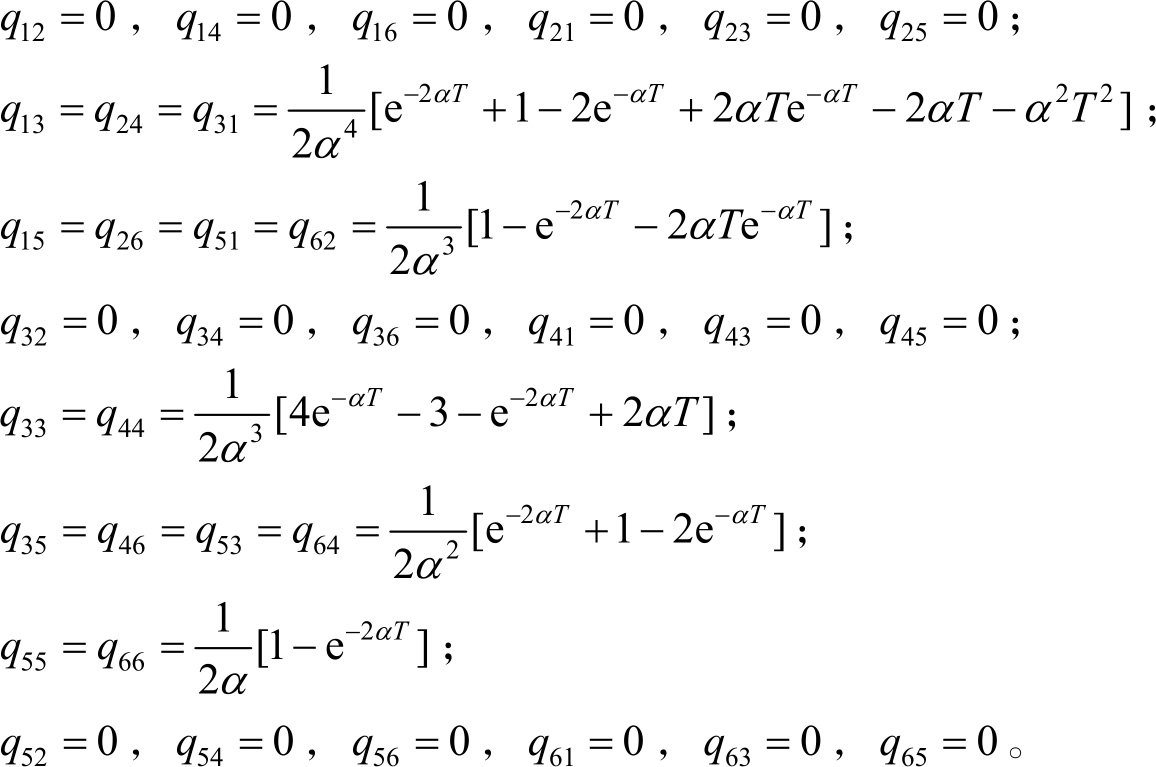
系统方差为

Q 为对称阵,其精确表达式为

 为机动加速度均值:
为机动加速度均值:
 。
。
该算法的一步预测方程为
X
(
k
|
k
-1)=
Φ
(
k
)
 (
k
-1|
k
-1)+
G
(
k
)
(
k
-1|
k
-1)+
G
(
k
)
 (
k
)。
(
k
)。
2)当前统计模型的加速度自适应
当前统计模型加速度方差为
 ,从此式不难看出,
a
max
和
a
-max
直接影响“当前”统计模型中“当前”加速度的方差
,从此式不难看出,
a
max
和
a
-max
直接影响“当前”统计模型中“当前”加速度的方差
 ,而
,而
 的大小又直接影响过程噪声的方差
Q
(
K
),从而影响滤波器的跟踪性能。
的大小又直接影响过程噪声的方差
Q
(
K
),从而影响滤波器的跟踪性能。
对 a max 和 a -max 进行分析,当 a max 和 a -max 的绝对值取较小值时,跟踪系统的系统方差较小,跟踪精度高,但跟踪目标机动变化范围较窄,且响应速度较慢;当 a max 和 a -max 的绝对值取较大值时,跟踪系统的系统方差较大,跟踪系统对较大范围机动的目标能以较大的系统方差保持快速响应,但跟踪精度较低;当 a max 和 a -max 取一定值后,在目标机动加速度较大时,系统方差较小,跟踪精度较高;但在机动加速度较小时,即目标弱机动情况下,系统的方差很大,跟踪精度较低。这说明对目标机动状态的大范围变化不能保证均有较高的跟踪精度。可见,该模型由于系统参数 a max 和 a -max 在跟踪过程中不能自适应调整,使得系统方差的调整有限。对于机动加速度大范围变动或突变的目标,其跟踪的快速性和精度的协调很难令人满意。
利用在IMM算法中计算得到的模型概率来自动调节 a max 和 a -max ,可以反应目标的机动特性,从而提高目标的跟踪性能。
通过模型概率
u
j
(
k
)自动调节当前统计模型中的
a
max
和
a
-max
,达到调节当前统计模型中当前加速度方差
 的目的,改进后的加速度方差
的目的,改进后的加速度方差
 的计算如下:
的计算如下:

式中: u j ( k )为当前统计模型 j 在时刻 k 计算得到的模型概率。