
下载掌阅APP,畅读海量书库
立即打开




雷达探测到的第一批点迹到来时,基于航迹的多假设算法假定所有点迹都来自真实目标,每个点迹都作为航迹头用来起始目标航迹。此时,以每个航迹头为原点建立关联波门,因为缺乏目标的先验信息,所以无法建立准确的关联波门,为了能以最大概率起始目标航迹,选择圆形波门作为关联波门,考虑到目标运动速度的限制,关联波门以目标可能的最大速度 v max 和雷达扫描周期 T 的乘积 v max T 作为半径,如图2.4所示。当雷达探测的第二批点迹到来时,对落入每个航迹头关联波门内的点迹,都以该航迹头为原点起始一条暂时航迹,并计算每个暂时航迹的置信度。
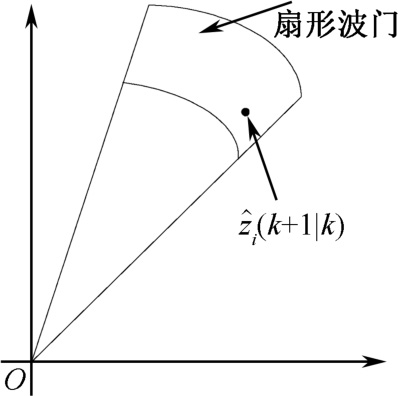
图2.3 扇形相关波门的形状
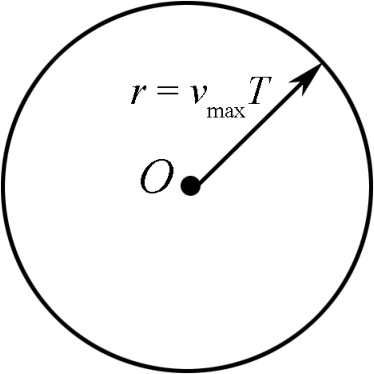
图2.4 初始关联波门示意图
接着对所有的暂时航迹进行航迹聚类,聚类原则为:如果两条暂时航迹拥有一个共同的点迹,则两条暂时航迹归为一个类;如果暂时航迹与一个类有共同的点迹,则暂时航迹归入该类中。航迹聚类完成后,在每一个航迹类中形成假设航迹。每个假设航迹可能包含多个暂时航迹,假设航迹的置信度由其包含的暂时航迹的置信度决定。选取每个航迹类中置信度最高的假设航迹,以选取的假设航迹中的暂时航迹进行后续的关联计算。
雷达第二次扫描结束时,存活的暂时航迹中只包含两个点迹,可以利用这两个点迹间的距离和雷达扫描周期
T
来估算目标的运动速度。以一维坐标为例,假设暂时航迹中,目标初始位置为
x
1
,第二次扫描时位置为
x
2
,则目标的速度估计值为
 。第二次扫描结束时,目标的位置
x
2
和估计速度
。第二次扫描结束时,目标的位置
x
2
和估计速度
 作为目标的初始状态
作为目标的初始状态
 ,即可利用Kalman滤波器进行预测和滤波,目标状态的预测值为
,即可利用Kalman滤波器进行预测和滤波,目标状态的预测值为
 ,位置估计值为
,位置估计值为
 。当雷达第三次扫描的点迹到达时,计算每个点迹与每条暂时航迹位置估计值的归一化距离
d
2
,如果
d
2
小于某个给定的门限
C
,则点迹与该暂时航迹关联。每一个与暂时航迹关联的点迹,都作为暂时航迹的分枝建立可能航迹,并计算出每条可能航迹的置信度。然后进行航迹聚类、假设生成、假设刷选,具体步骤如雷达第二次扫描时所述。利用每个存活航迹关联上的第三个点迹,对该航迹进行滤波更新。如此反复,直到存活航迹的置信度满足预先的门限值,即将该航迹转为确定航迹。
。当雷达第三次扫描的点迹到达时,计算每个点迹与每条暂时航迹位置估计值的归一化距离
d
2
,如果
d
2
小于某个给定的门限
C
,则点迹与该暂时航迹关联。每一个与暂时航迹关联的点迹,都作为暂时航迹的分枝建立可能航迹,并计算出每条可能航迹的置信度。然后进行航迹聚类、假设生成、假设刷选,具体步骤如雷达第二次扫描时所述。利用每个存活航迹关联上的第三个点迹,对该航迹进行滤波更新。如此反复,直到存活航迹的置信度满足预先的门限值,即将该航迹转为确定航迹。
由以上多假设航迹起始的过程可知,在航迹起始的预测和滤波阶段,如果能找到符合目标运动模式的滤波模型,可以增加预测和滤波的精度。预测精度的增加可以减小点迹之间的归一化距离 d 2 ,降低错误关联的数量,进而降低算法的计算量;滤波精度的增加则可提高起始航迹的精度。