
下载掌阅APP,畅读海量书库
立即打开




远程骨科机器人微创手术业务是利用中关村医疗器械产业技术联盟科技成果,引进远程骨科机器人微创手术系统,并依托北京积水潭医院专科提供术前手术规划、术中手术指导及术后手术评估等专家支持,以此提高基层医疗机构诊治重大疾病的能力,并为解决“看病难、看病贵”问题提供有力的技术支撑。克拉玛依市中心医院自2014年12月引进骨科机器人微创手术系统以来,累计开展骨科机器人微创手术40多例,疾病类型多为股骨骨折。
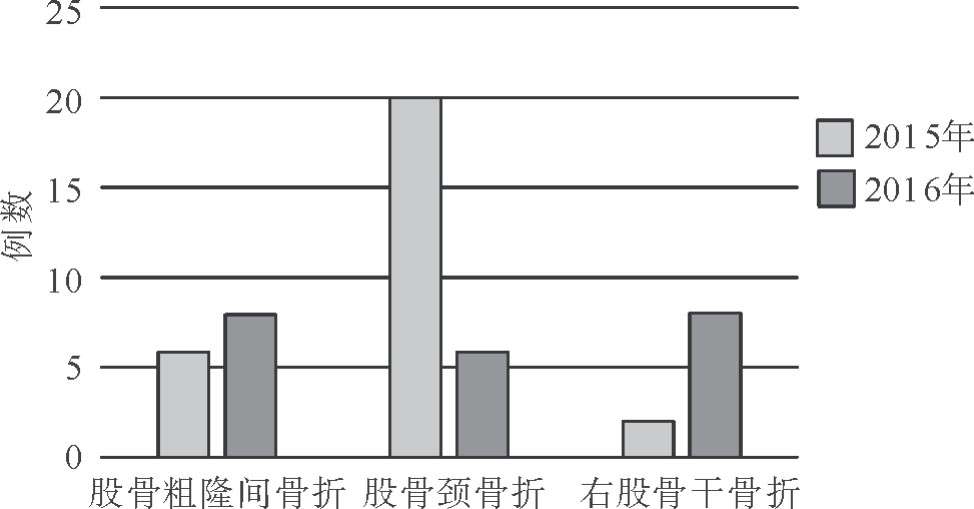
图4-5 2014—2016年远程骨科机器人微创手术业务情况
克拉玛依市中心医院利用现有手术室良好的基础及铅防护环境,通过购置北京天智航医疗科技股份有限公司(以下简称“天智航”)生产的骨科机器人导航定位系统,结合医院现有C型臂X射线机等关键设备,完成与骨科手术机器人相配套的会诊系统建设。
远程骨科机器人手术不仅具有机械臂稳定性更好、定位更精准的优点,可大大提高手术治疗质量,而且缩短手术中X射线机的透视时间,减少射线对人的危害。除此之外,对于新疆维吾尔自治区内复杂疑难手术,可以直接借助远程骨科机器人系统实现与北京积水潭医院知名手术专家诊疗同质化。
在骨科机器人实施智能微创手术中,为确保对智能微创手术的有效支撑,一方面要保证骨科手术机器人与手术室内C型臂X射线机等设备协同工作,另一方面也要对接医院原华为小车会诊系统,提供高质量的音频、视频互动环境及网络环境,实现与手术室外部(甚至医院外部)的信息交流,使不在手术现场的专家能够通过远程规划等手段对骨科手术机器人的操作进行现场指导。基于克拉玛依市中心医院现有的信息化建设基础,本方案将整个系统预留为多个分系统及接口建设来进行,远程实施费用需要医院来解决(图4-6)。
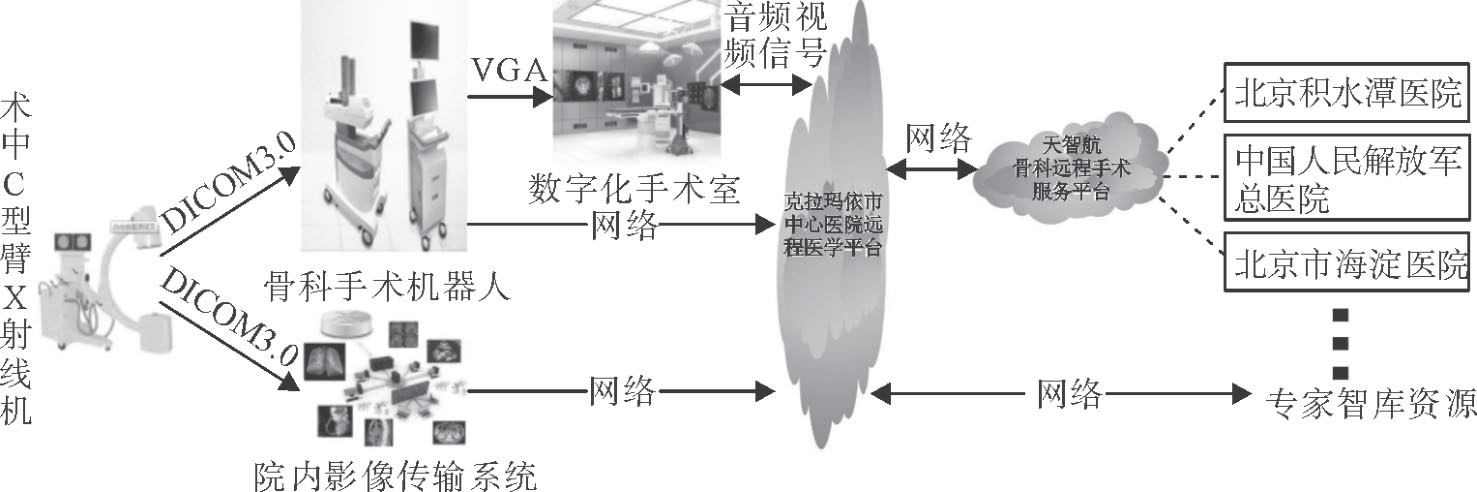
图4-6 智能微创手术环境相关各分系统连接拓扑图
(1)在手术室内部将骨科手术机器人与术中C型臂X射线机通过特定接口进行连接,使二者可协同工作,基于骨科手术的术中影像采集分析,完成手术机器人的执行操作。
(2)在手术室内部通过对接华为小车会诊系统,实现手术室内部的音频、视频集中管理及展示,便于术中医生集中阅读相关影像资料、患者信息及会诊交互画面等。通过特定预留接口对接华为小车会诊系统,与克拉玛依市中心医院远程医学平台相对接,可将骨科手术机器人的相关屏幕画面接入手术室外部,同时将手术室外部的音频、视频信息在手术室内进行展示。
(3)充分利用已经建成的克拉玛依市中心医院远程医学平台,将其作为医院手术室与院内会诊室、院内会诊方与院外会诊方之间的网络连接通道,满足院内及院外多方音频、视频会诊的需要。同时,该平台也可连接天智航骨科远程手术服务平台,对接相关专家智库资源,实现术中远程机器人手术规划现场指导。
(4)将术中C型臂X射线机等设备所采集到的患者术中医疗影像直接传输至院内影像传输系统(PACS),实现术中影像集中存储管理,也可以将采集到的患者术中医疗影像直接传输至克拉玛依市中心医院远程医疗平台,远程专家通过远程医疗平台实施现场手术指导。
1.术中医疗影像采集到手术机器人
将术中X射线机与骨科手术机器人通过如下方式连接:
(1)对于具备DICOM3.0接口网络模块的X射线机,将术中X射线机的RJ-45接口与骨科手术机器人的RJ-45接口相连接,或者两者均接至同一个局域网中,再在X射线机上注册骨科手术机器人相关信息(如AE、PORT、IP等)。
(2)对于不具备DICOM3.0接口网络模块的X射线机,将X射线机的BNC接口与骨科手术机器人的BNC接口相连接。
基于此连接,X射线机在采集患者的骨科影像时可将图像发送至骨科手术机器人系统中。术者通过机器人规划软件(机器人端)调取所采集到的术中影像数据文件进行手术规划,并在此基础上控制机器人执行后续手术操作。
2.手术机器人的视频共享
通过VGA视频线接入手术机器人控制主机的VGA视频接口(图像比例16∶9),另一端接至数字化手术室的对应输入端。经由数字化手术室的视频路由切换,机器人的手术规划软件画面可自由切换至手术室内的任意屏幕上,或者按需共享至其他房间。
3.术中医疗影像的集中存储
通常将与医院影像传输系统相连接的网络接入到术中X射线机的RJ-45接口。假设该机器已购买网络模块,并在X射线机上注册影像传输系统相关信息(如AE、PORT、IP等)。X射线机在采集患者的骨科影像时可同步上传至医院的影像传输系统中,实现术中医疗影像集中存储管理。
1.术中视频共享方法
从手术室的视频输出端中选择两路视频信号,分别接入到华为远程视频会议终端的两个视频输入接口上。
2.术中音频共享方法
将手术室来自音频设备的音频输出端信号接入到华为远程视频会议终端的音频输入接口。
3.室外会诊视频接入方法
将两路远端视频信号通过华为远程视频会议终端的视频输出接口输出,另一端接至手术室的两个对应视频输入端,经由手术室的视频路由切换,远程会诊画面可实时、自由地被切换至手术室内的任意屏幕上。
4.室外会诊音频接入方法
将远端音频信号通过华为远程视频会议终端的音频输出接口输出,另一端接至手术室的对应音频输入端,经由手术室调度可将远程会诊的音频在手术室内实时播放。
1.远程医疗平台对接方案
采用专用线路将远程骨科手术服务平台接入到克拉玛依市中心医院远程医疗平台中,从而实现与北京积水潭医院、中国人民解放军总医院等开展院际远程手术会诊。
2.骨科手术机器人远程手术规划的接口实现
通过网线接入骨科手术机器人控制主机的RJ-45接口,可将手术机器人与院内会诊室(或院外会诊室)的电脑相连接。当该网络可访问天智航远程骨科手术服务平台的服务器时,可通过上述步骤实现手术遥规划。所谓遥规划,就是通过远程医疗平台发来的患者CT或磁共振影像结果及相关病史资料传输,便于异地手术专家规划手术方案,将确认好的手术方案传回到远程医疗平台,并输入到骨科机器人系统中。
(1)手术室术者通过机器人规划软件(机器人端),将骨科机器人从手术室内X射线机所采集到的术中影像数据文件,上传至天智航服务器上。
(2)会诊室专家通过安装在会诊室电脑上的手术规划软件(专家端),从天智航服务器下载该影像数据文件,进行手术规划,生成规划数据文件。
(3)会诊室专家通过手术规划软件(专家端),将规划数据文件上传至天智航服务器上。
(4)手术室术者通过机器人规划软件(机器人端),从天智航服务器上下载规划数据文件,将数据文件调入到规划软件中查验结果,并在此基础上控制机器人执行后续手术操作(图4-7)。
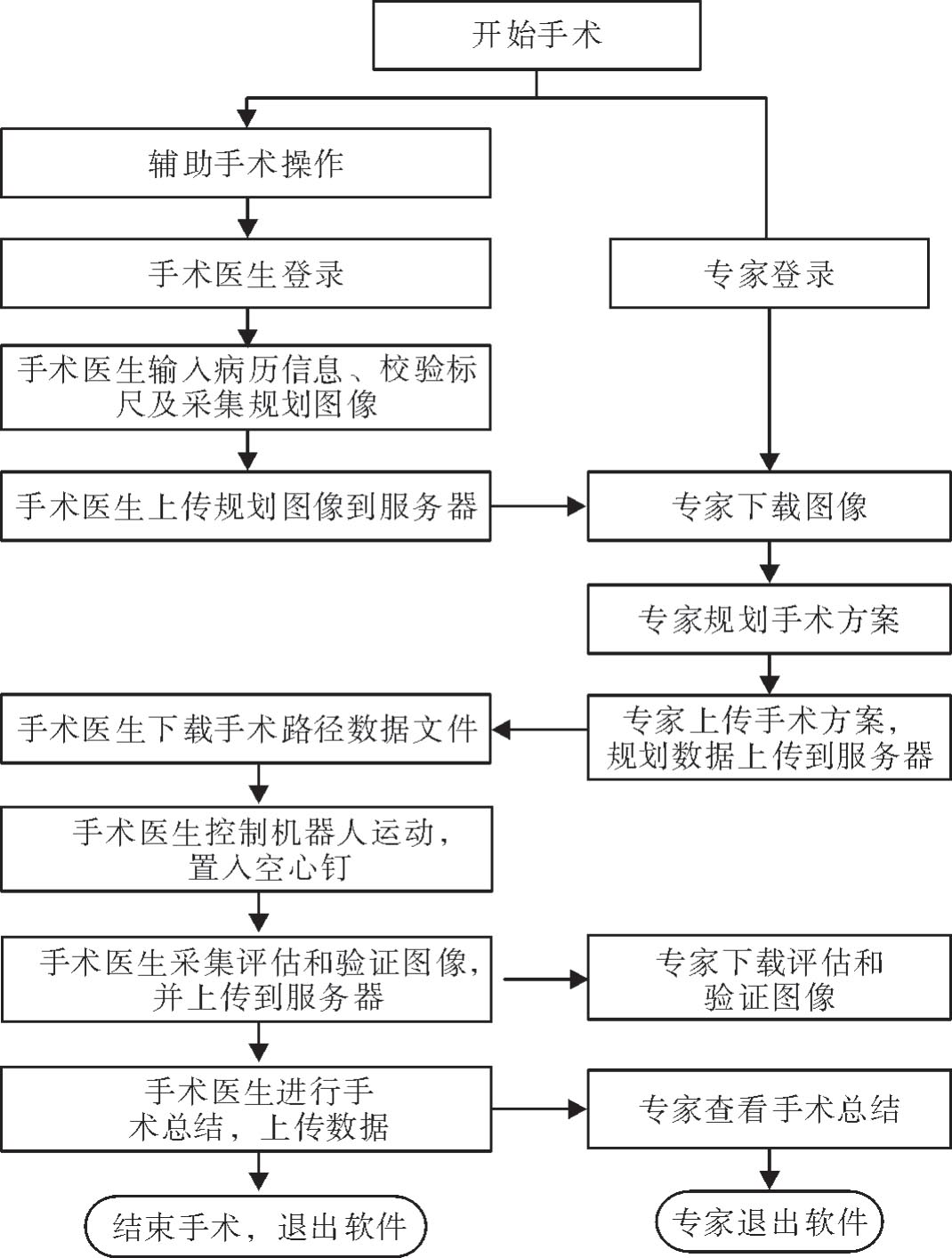
图4-7 远程手术规划指导流程
数字化手术室建设是实现远程骨科机器人手术的必要条件,其系统如图4-8所示。
在手术室内部安装吊臂式术野摄像系统,包括术野摄像机控制器、音响麦克风连线、高清摄像头等设备。将骨科机器人主机系统和术野摄像控制系统分别与华为数字化移动推车连接,实现术中远程手术示教与指导。
华为数字化移动推车内部有多个设备,包括华为视频会议终端、多画面处理器、术野摄像头控制器等,均需单独操作控制。若加入设备集控的功能,需进行专门的定制开发。
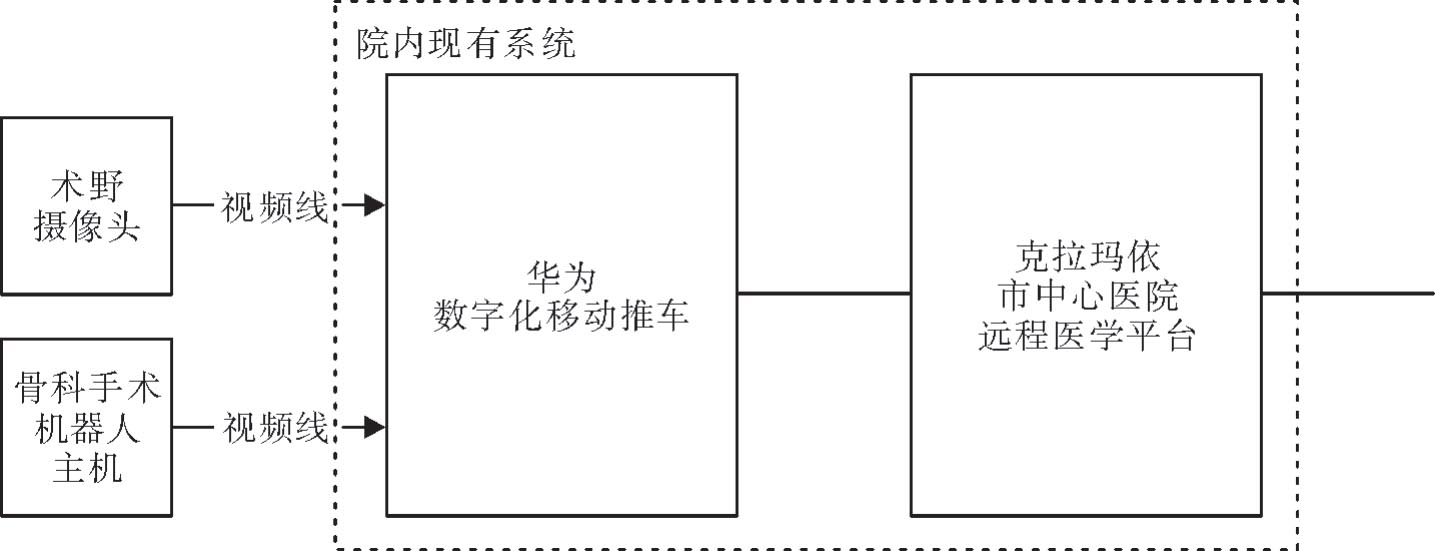
图4-8 数字化手术室流程图
数字化手术室的施工方案:①安装术野摄像头吊臂及术野摄像头系统。②购买无线对讲耳麦、音箱等设备及线材,调试线路,接线联调。
1.用途
用于骨科空心螺钉内固手术和脊柱螺钉内固手术。
2.优势
一方面,植入物实际的置入位置与规划理想位置的符合率为100.00%,可很好地实现术前路径规划;另一方面,使用骨科手术机器人手术使植入物置入完成时间和手术总时间明显减少,而且其平均透视次数约为徒手手术方法的10.00%,大大减少了医生和患者的辐射损伤。
2015年3月14日,克拉玛依市中心医院开展新疆维吾尔自治区第1例髋关节部位的利用骨科机器人远程定位导航手术,手术实施了骨折脱位的复位、螺钉内固定等项目,患者目前术后状态良好。为确保手术的成功,北京积水潭医院的专家王军强专程来克拉玛依市中心医院进行现场指导。同时,借助远程医疗平台北京积水潭医院的骨科专家也对当天的手术进行了远程支援。参与骨科机器人手术的李建民医生表示:“通过远程网络平台,骨科医生将患者影像及病历资料传输给北京积水潭医院的专家,专家根据这些资料规划手术方案,将手术方案指令传回给骨科机器人,骨科机器人再按照遥规划手术方案,在骨科医生现场监督下完成手术,手术过程中远程医疗平台另一端的专家可以实施监控和远程指导。这一过程相当于北京专家将专业技术延伸到克拉玛依市,并进行现场手术,同时也有利于提高新疆维吾尔自治区内骨科医生的临床诊治能力。”