
下载掌阅APP,畅读海量书库
立即打开




如图1-1 所示,设单位向量ω,对于任意向量a,其始点在ω轴上,a绕ω旋转任意角ε得到新的矢量b,求矢量b。
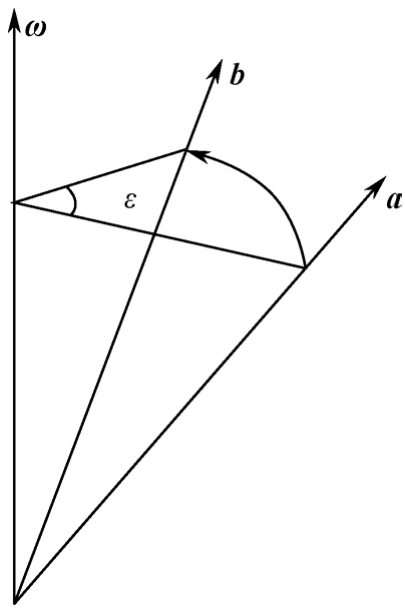
图1-1 矢量旋转
显然b是关于a、ω、ε的函数。b作为空间向量,用a、ω两个向量不足以表达,因此引入第三个矢量ω×a。这样b就可以表示为

这里有三个未知量λ 1 、λ 2 、λ 3 ,研究回转过程可知,b大小不变,即

b与ω的夹角不变,即

因此ω×a与ω×b的夹角也为ε,即

由式 (1-2)~式(1-4) 可确定λ 1 、λ 2 、λ 3 。对式 (1-1) 两端做ω数量积,得

则利用式 (1-3) 可得

对式 (1-1) 两端做a数量积,得

则利用拉格朗日恒等式可得

又因|ω×a|=|ω×b|,利用式 (1-4) 可得

与 (1-7) 式做对比可知

利用式 (1-1),注意到 a 2 =b 2 ,可得

所以

经验证,
这样可得旋转矢量表达式

由矢量旋转的表达式 (1-11) 可以看出,矢量旋转其实是施行了若干矢量运算。因此,向量的运算可以在向量旋转前或旋转后进行,其结果是相同的。用向量的向量积来解释就是:两个向量先做向量积再施行旋转与先施行旋转再做向量积,其最终得到的结果是一样的。
对于任意一个刚体,为了完全确定它在空间的位置,只要在刚体上固定一个坐标系 (S 1 ),如果我们能够对某个参考坐标系 (S 2 ) 描述这个坐标系 (S 1 ) 的位置,那么也就说明了此刚体在空间的位置。这就是坐标变换的意义所在。
这里所说的坐标变换是指坐标系的变化,这种变换广义上可以理解成一个映射或算子,即矢量在一个坐标系中的描述变换为在另一个坐标系的描述,或算子作用于一个矢量,代表一个移动或转动,或兼而有之。
如图1-2所示,两个坐标系S
1
{O
1
—x
1
,y
1
,z
1
}以及S
2
{O
2
—x
2
,y
2
,z
2
},在坐标系S
1
中存在径矢
 ,或称点P的坐标。如何在坐标系S
2
中表示P点的坐标?这就是坐标变换问题。
,或称点P的坐标。如何在坐标系S
2
中表示P点的坐标?这就是坐标变换问题。
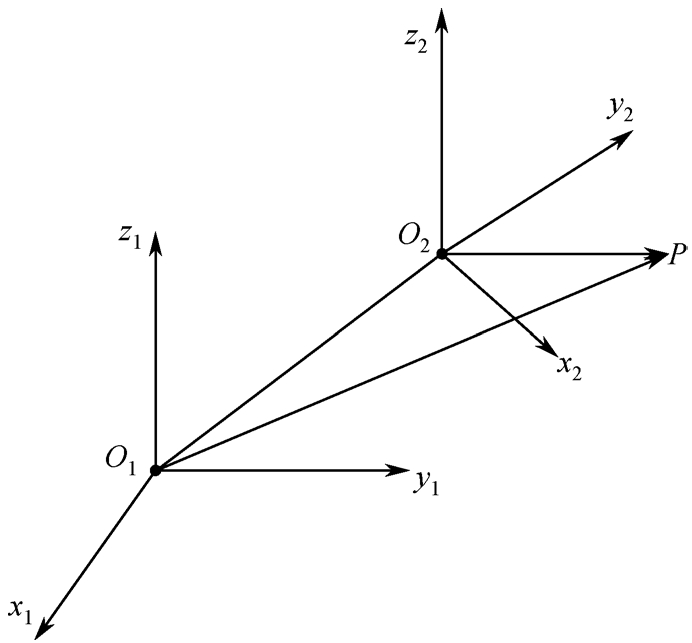
图1-2 坐标变换
坐标变换存在如下的表达式:

即,坐标系S
1
经过一个平移
 (在S
2
坐标系表达),再做一个旋转R变换到与S
2
重合。这时,径矢
(在S
2
坐标系表达),再做一个旋转R变换到与S
2
重合。这时,径矢
 即为
即为
 在坐标系S
2
中的表达。
在坐标系S
2
中的表达。
1.旋转坐标变换
下面研究旋转变换矩阵R,R为3×3正交矩阵,对于右旋标架detR=1。

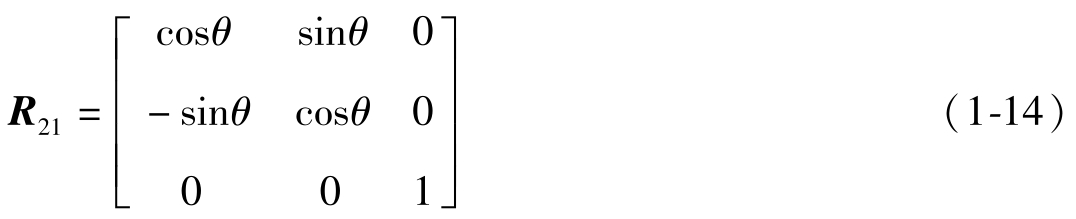
将坐标系S 1 经过一个平移c 21 ,使其原点重合;R 21 中每个元素为对应坐标轴夹角的余弦,即a 11 =i 1 .i 2 ,a 12 =j 1 .i 2 ,a 21 =i 1 .j 2 ,其他元素依次类推。假设坐标系S 1 相对于S 2 绕z 2 轴顺时针旋转θ角后重叠,则旋转变换矩阵为
由R的形成可以看出,R的每一行或每一列的元素平方和等于1,任意两行或任意两列元素乘积之和等于零,R的逆矩阵等于它的转置,即[R] -1 =[R] T 。
从标架的角度看,R 21 就是坐标系S 1 在S 2 中的描述,它的三列就是S 1 的三个坐标轴单位矢量(i 1 ,j 1 ,k 1 )在S 2 中的表示。
从映射或算子的观点看,如果在S 1 有一矢量a 1 ,想求其在S 2 中的表达a 2 ,则a 2 =R 21 .a 1 ,这时要求坐标系S 1 、S 2 是同原点的。这对于自由矢量变换没有问题,但如果变换的矢量为径矢,则必须用式 (1-12) 的既平移又旋转。为表达方便,将式 (1-12) 化作映射或算子,引入齐次坐标变换矩阵。
2.齐次坐标变换
齐次变换把坐标看作4维来考虑。实数轴有限远点与笛卡尔坐标系中点的坐标形成一一对应的关系,无穷原点在三维欧氏空间没有坐标,为了刻画无穷原点,需要引入齐次坐标(x
*
,y
*
,z
*
,l)。如果把齐次坐标写作
 ,我们就会发现:当 l≠0时,表示有限远点;当l=0时,表示无穷原点的坐标。因此,有限远点的齐次坐标可以写作(x,y,z,1)。把式 (1-12) 的变换用齐次变换来描述,则
,我们就会发现:当 l≠0时,表示有限远点;当l=0时,表示无穷原点的坐标。因此,有限远点的齐次坐标可以写作(x,y,z,1)。把式 (1-12) 的变换用齐次变换来描述,则
 ,其中
,其中
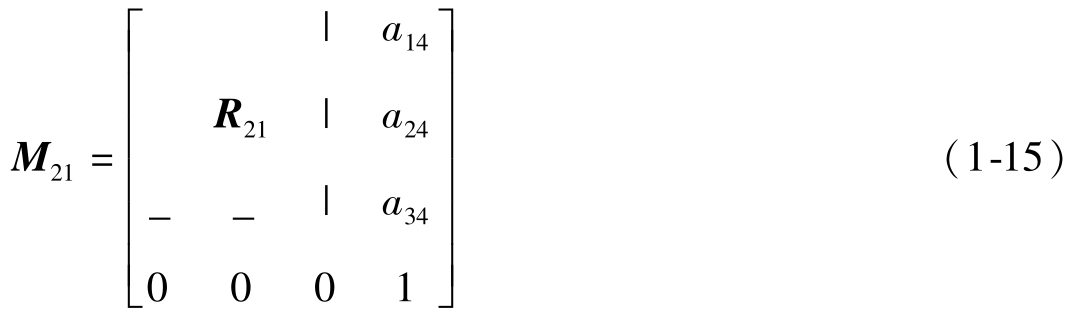
式中:R
21
为旋转变换矩阵式 (1-13);元素a
14
,a
24
,a
34
表示坐标系S
1
的原点O
1
在坐标系S
2
中的坐标,即
 。
。
如果进行逆变换,即坐标系S 2 向坐标系S 1 变换,则有
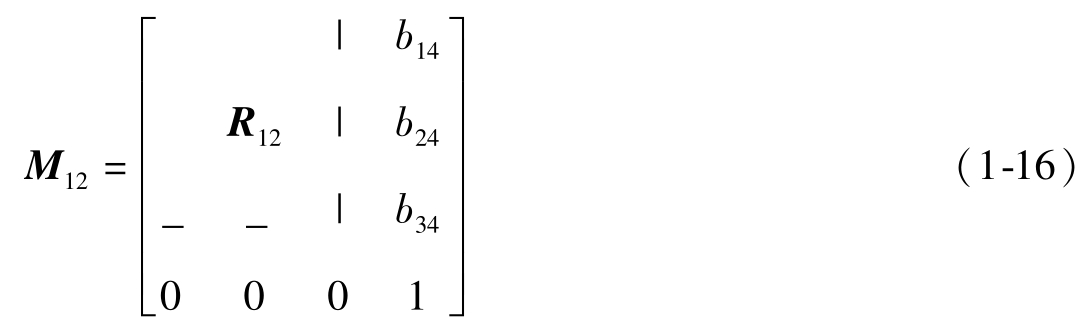
这时,b 14 =-(a 11 a 14 +a 21 a 24 +a 31 a 34 ),b 24 =-(a 12 a 14 +a 22 a 24 +a 32 a 34 ),b 34 =-(a 13 a 14 +a 23 a 24 +a 33 a 34 ),仔细观察会发现,括号内的项目分别为M 21 第4列元素同第1、2、3列元素的乘积之和。
为了熟悉上述的矢量变化,下面举一个机械手的运动分析的例子。
例1-1 图1-3所示为一个工业4自由度机械手。第1个自由度,|OO 1 |=l 1 段可绕O—z轴旋转任意角度q 1 ;第2、3个自由度,|O 1 O 2 |=l 2 段可绕O 1 —x 1 轴旋转任意角度q 2 ,|O 2 O 3 |=l 3 段绕O 2 —x 2 轴旋转任意角度q 3 ;第4个自由度,|O 3 P|=s段可绕O 3 —y 3 轴旋转任意角度q 4 。试确定P点的运动轨迹。
解
建立如图1-3所示的坐标系,坐标系S{O—x,y,z}为空间固定坐标系,S
1
{O
1
—x
1
,y
1
,z
1
}与第1段杆件固联,坐标原点在O
1
点,z与z
1
轴重合,S
1
绕z轴相对于S旋转q
1
角。相当于S平移
 ,再绕z轴旋转q
1
角后,得到S
1
坐标系。
,再绕z轴旋转q
1
角后,得到S
1
坐标系。
依此类推,S 2 {O 2 —x 2 ,y 2 ,z 2 }与第2段杆件固联,x 2 与x 1 轴方向一致,其相对于S 1 的x 1 轴旋转q 2 角;S 3 {O 3 —x 3 ,y 3 ,z 3 }与第3段杆件固联,x 3 与x 2 轴方向一致,其相对S 2 的x 2 轴旋转q 3 角。
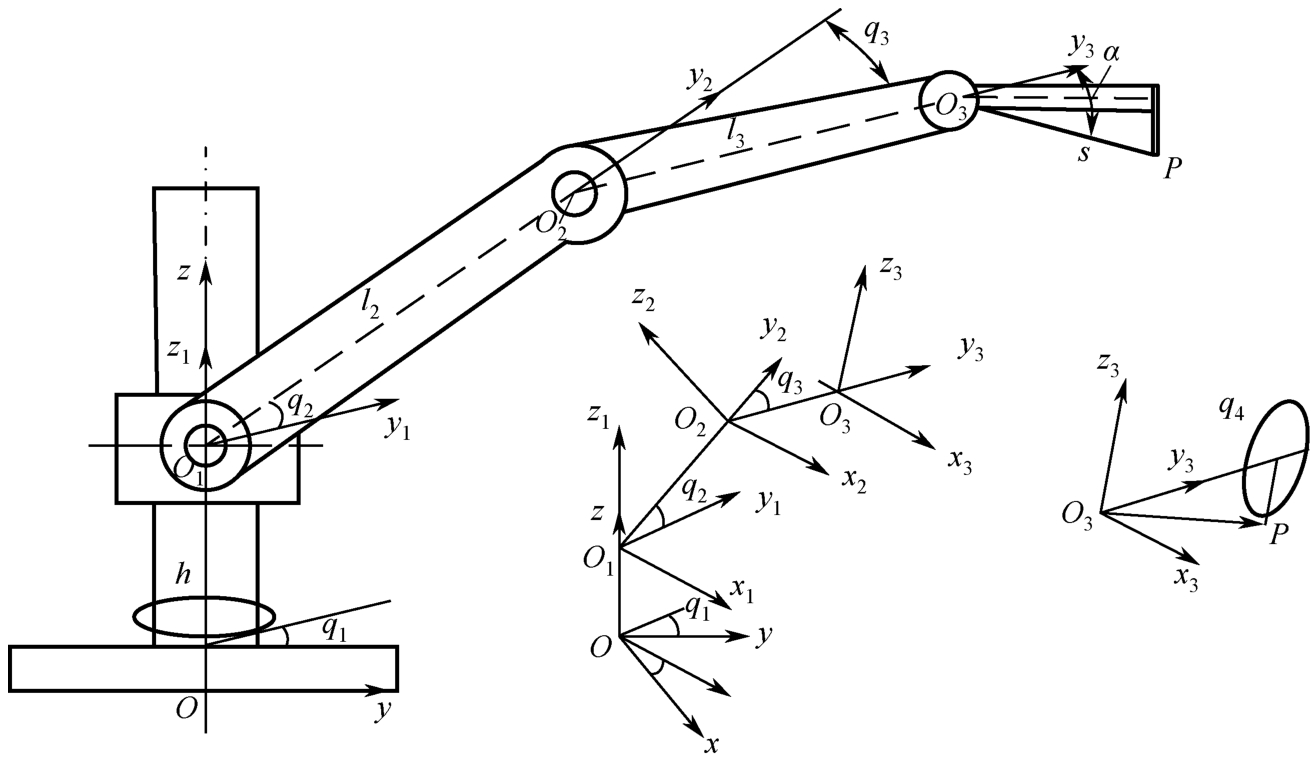
图1-3 机械手的坐标变化
首先确定 P 点在坐标系 S
3
中的轨迹,因
 ,绕旋转轴y
3
:{0,1,0}旋转角度q
4
,利用矢量旋转公式 (1-11) 可得
,绕旋转轴y
3
:{0,1,0}旋转角度q
4
,利用矢量旋转公式 (1-11) 可得

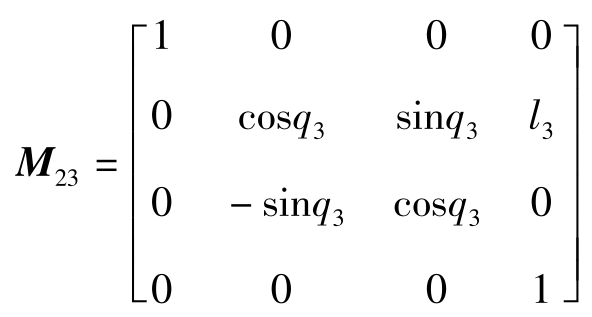
坐标系S 3 →S 2 齐次变换矩阵为
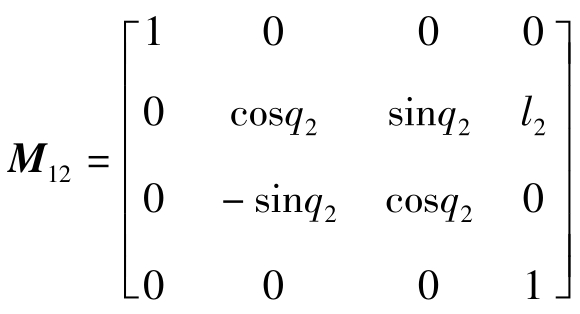
坐标系S 2 →S 1 齐次变换矩阵为
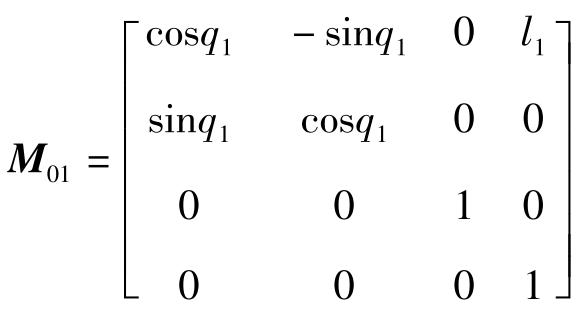
坐标系S 1 →S齐次变换矩阵为
连乘上述矩阵,即可得到P点在坐标系S中的轨迹方程
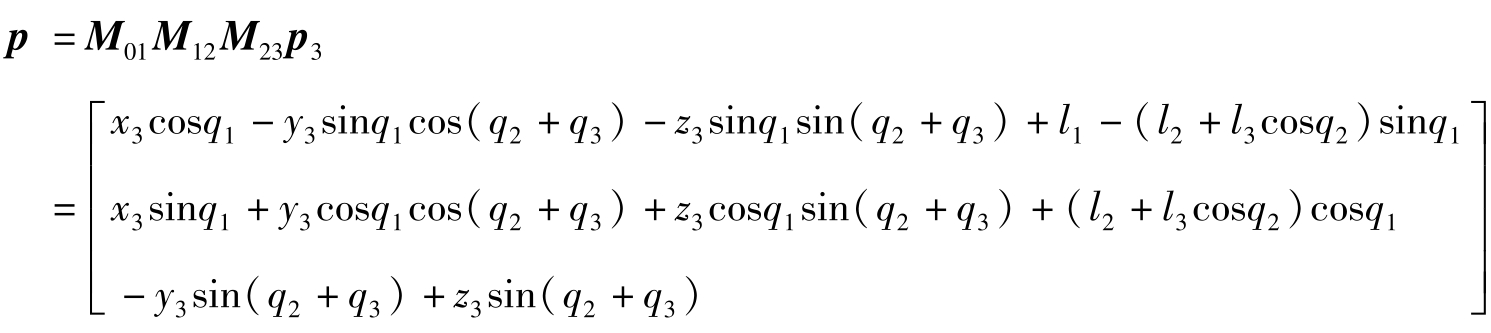
如果求解上述问题的逆命题,已知P点的运动轨迹或位置坐标,求机械手运动的转角(q 1 ,q 2 ,q 3 ,q 4 ),利用上式也是可以确定的。
最后要说明一下:对于复合变换一定要注意矩阵的相乘顺序,左乘右乘结果是不同的;自由矢量变换使用旋转映射即可,径矢或点的坐标变换则需使用齐次映射。