下载掌阅APP,畅读海量书库
立即打开




齿轮的加工与啮合质量控制都是以共轭曲面原理为基础的。在齿轮设计、分析计算以及加工过程中,齿面主曲率和主方向的求解尤为关键。给定完全共轭齿面中的一个齿面与两齿面之间的相对运动关系,求解另一共轭曲面,是共轭曲面原理的一个基本问题。
诱导法曲率的定义为:两曲面在切点沿同一个方向的法曲率的差值。若已知一个曲面计算点处的主方向、主曲率以及该点处的诱导法曲率主值,即可求解与该曲面共轭的曲面的主方向和主曲率。如果两齿面相切在一条线上,即当两曲面作线接触传动时,沿接触线方向两曲面的dr、dn、ds都是相等的,所以两曲面分别沿这两个方向上的法曲率必然相等,故该方向上的诱导法曲率为K I =0,它是该点处诱导法曲率的一个主值,此接触线的方向则是与诱导法曲率相对应的一个主方向 (用符号χ表示),这种情况下只需求解另外一个主方向 (ψ) 的主值K II 即可。需注意,诱导法曲率的主值的正负须根据公法矢的方向选取,且诱导法曲率的两个主值符号不会相反。
把两个曲面看作真实齿轮副的配对齿面。曲面一侧为轮齿实体,而曲面另一侧为齿槽空间。如果规定齿面∑ (2) 的计算点处的法矢方向是由实体指向空间,即齿面∑ (1) 的计算点处的法矢方向是由空间指向实体,则在这种情况下要想齿面正常啮合,两配对曲面的诱导法曲率就不能为正值,即K II ≤0 (若齿面∑ (2) 在计算点处的法矢方向是由空间指向实体,则两齿面之间的诱导法曲率必须为正值);否则,两齿面将会出现曲率干涉现象。
已知齿面∑ (2) ,求解与之共轭的小轮齿面∑ (1) 的主方向和主曲率,其计算过程如下:
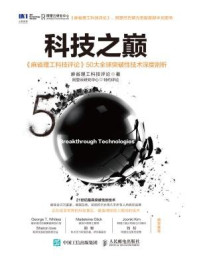
给定共轭接触点切平面坐标系如图1-19所示。曲面∑ (1) 主方向 (e,f),对应主值为 (k e ,k f );曲面∑ (2) 主方向 (s,q),对应主值为 (k s ,k q );σ 12 为两齿面计算点处主方向之间的夹角;φ v 为两齿面计算点处相对运动方向与主方向e之间的夹角;φ m 为两齿面计算点处诱导法曲率主方向x与∑ (1) 主方向e之间的夹角;θ v 为两齿面计算点处接触线的切线方向x(图1-18的t—t方向) 到相对运动速度V (12) 方向的有向角。

图1-19 计算点处各个方向间的夹角
两齿面啮合点处诱导法曲率的一个主值K II 与K v 之间的关系为

因为x与瞬时接触线在计算点处相切,但是方向指向尚有待确定:矢量p也在接触点处的切平面上并且与接触线的切线方向垂直,p的计算方法在式 (1-42) 中已给出,所以可以利用矢量p来定义x的方向,即:令x、p以及计算点处的单位法矢n组成相互垂直的右手坐标系,所以θ v 可由式 (1-64) 直接计算得出。
角度θ
v
取值应该遵循:它的符号与V
(12)
.p的符号相同,而且当 (n,p,V
(12)
) 为正时,θ
v
的绝对值应该在
 之间;当 (n,p,V
(12)
) 为负时,θ
v
的绝对值应该在
之间;当 (n,p,V
(12)
) 为负时,θ
v
的绝对值应该在
 之间。
之间。
利用欧拉公式,已知大轮齿面∑ (2) 的主曲率数值,可计算出与之共轭的小轮∑ (1) 计算点处的主曲率:

主方向可采用如下的坐标变换形式得出:

已知大轮齿面计算点处的主方向和主曲率,根据啮合运动时两齿面在啮合点处的相对运动关系确定两齿面计算点处的主方向间的夹角,继而确定小轮齿面计算点处的主方向、主曲率。
两曲面∑ (1) 和∑ (2) 在M点相切接触,M点处的公切面投影图如图1-20所示。其中e和f、k e 和k f 分别是曲面∑ (1) 在M点的两个主方向的单位向量和其所对应的曲率主值;s和q、k s 和k q 为曲面∑ (2) 在M点的两个主方向的单位向量和其所对应的曲率主值;σ 12 为主方向e和s之间的夹角。

图1-20 共轭曲面在M点处的公切面投影图
设接触点相对曲面∑
(1)
、∑
(2)
的运动速度分别为
 和
和
 ,曲面∑
(1)
和曲面∑
(2)
接触点的相对运动速度为V
(12)
,则其在主方向上的投影为
,曲面∑
(1)
和曲面∑
(2)
接触点的相对运动速度为V
(12)
,则其在主方向上的投影为

曲面∑ (1) 与曲面∑ (2) 是一对共轭曲面,两齿面瞬时接触处于线接触状态,两齿面的主曲率、主方向之间的关系符合下式:

式中

假定大轮齿面∑ (2) 计算点处参数已知,可根据上述式子计算小轮齿面∑ (1) 计算点处的主曲率:

主方向可由类似于式 (1-75) 的坐标变换得出。
数值微分法是建立在主方向、主曲率定义的基础上的,它通过求微分直接求解共轭齿面的曲率参数。数值微分法计算共轭齿面曲面参数是在曲面第Ⅰ、Ⅱ基本量的基础之上,在精度允许范围内求数值微分,运用罗德里格公式求解计算点处的主方向 (e 1 、e 2 )和主曲率 (k 1 、k 2 )。
将齿面表示为曲纹坐标网的形式,如图1-21所示。r(u,θ)在u曲线和θ曲线上的偏导矢,分别记作r u 、r θ 。在曲面上取一点M,该点处的切向量为r u 、r θ 的基向量,k n 为过M点某一方向du/dθ(dr=r u du+r θ dθ)上对应的法曲率。

图1-21 曲面切平面中的切方向
首先给定 ∑ (2) 计算点的曲面参数 M (u,θ) 数值,计算径矢r (2) (u,θ)和法矢n (2) (u,θ),通过啮合方程计算共轭曲面∑ (1) 的径矢r (1) (u 0 ,θ 0 )以及法矢n (1) (u 0 ,θ 0 )。
在两个参数坐标方向分别给定微分增量Δθ、Δu,求对应 (u
0
+Δu,θ
0
) 点的增量径矢r
(2)
(u+Δu,θ)和法矢n
(2)
(u+Δu,θ),仍然通过啮合方程计算共轭曲面∑
(1)
的径矢r
(1)
(u+Δu,θ)、法矢n
(1)
(u+Δu,θ)。r
(1)
、n
(1)
的微分
 为
为

同理,可求出另一参数θ方向的偏微分
 :
:

利用式 (1-80) 和式 (1-81) 的计算结果求出曲面∑ (1) 第一、二基本量:

根据罗德里格定理可求出计算点处的主方向,主方向为 du/dθ的比值,令 λ=du/dθ,则

求解式 (1-83) 的一元二次方程,可得到两个解 (若解存在的话) λ 1 、λ 2 ,即两个主方向,进一步表示为

式 (1-84) 对应的法曲率主值为

如果只要求法曲率的主值,也可以利用下式求得:

由上式可以确定两个实根,即主曲率k 1 、k 2 。
主方向及其曲率求解所涉及的矢量、角度多,计算中有关角度数值的符号要特别注意,极易出现方向错误。数值微分法无须引入额外的参数值,计算过程思路清晰,主方向同主曲率能够达到严格对应,但其计算精度决定于所选取的微分增量数值。