
下载掌阅APP,畅读海量书库
立即打开



二型模糊系统比一型模糊系统更加复杂,因此Zadeh提出二型模糊集后,并未很快地得到发展,仅有少量的研究者从事了这方面的研究。在 20 世纪 70年代,研究者将大量的精力投入到了一型模糊系统的研究,随着一型模糊理论的不断发展,人们才开始将注意力投入到了更具挑战的二型模糊理论。到了20 世纪 90 年代末,以 Mendel 为代表的科学家开启了二型模糊集的研究热潮 [39~42,109~130] 。近年来,一些二型模糊集的新表示方法被提出后,二型模糊集在学术界得到了极大关注。二型模糊集最初主要是基于垂直切片表示法进行数学描述。因为垂直切片表示法直观易懂,它在二型模糊集理论发展中占有重要地位 [40] 。下面有关二型模糊集的概念引自文献[40,109,110]。论域 X 上二型模糊集合 A ~的垂直切片表示法如下所示。

式中,
 为
A
~的次隶属函数,
J
x
′
为主隶属度,
为
A
~的次隶属函数,
J
x
′
为主隶属度,
 为次隶属度。
为次隶属度。
若二型模糊集合 A ~的次隶属度全为1,则被称为区间二型模糊集,如下

区间二型模糊集作为普通二型模糊集的特殊版本,计算相对简单,同时它保留了二型模糊集处理不确定性的良好性质,因此,区间二型模糊集在实际应用中更受重视。
集合 A ~中主隶属度所组成的区域称为不确定性的迹(Footprint Of Uncertainty,FOU),其定义可见下式。

FOU的上、下边界分别被称为上、下隶属度函数,分别记为
 。下面用一个简单的实例来直观说明前述概念。图1-1引自文献[110],它描述了普通二型模糊集和区间二型模糊集的特征。图1-1(a)和图 1-1(b)共同描述了一个普通二型模糊集合,其中阴影部分表示FOU,图1-1(b)表示
A
~在论域
x
′=2处的次隶属函数。图1-1(a)和图1-1(c)共同描述了一个区间二型模糊集合,其中阴影部分表示FOU,次隶属度恒为1。
。下面用一个简单的实例来直观说明前述概念。图1-1引自文献[110],它描述了普通二型模糊集和区间二型模糊集的特征。图1-1(a)和图 1-1(b)共同描述了一个普通二型模糊集合,其中阴影部分表示FOU,图1-1(b)表示
A
~在论域
x
′=2处的次隶属函数。图1-1(a)和图1-1(c)共同描述了一个区间二型模糊集合,其中阴影部分表示FOU,次隶属度恒为1。
文献[116]基于垂直切片表示法,并利用扩展原理定义了二型模糊集的集合运算。为了减少集合运算的复杂度,Karnik 和 Mendel 又给出了集合运算的一般形式,并讨论了具有特殊形状的二型模糊集合的简化运算 [117] 。尽管垂直切片表示法易于理解,但会增加计算的复杂性。因此,二型模糊集合的表示法也是一个重要研究方向。后来,人们相继提出了波浪切片表示法 [118] 、计算几何学表示法 [119] 、Z切片表示法 [120] 及a-平面表示法 [121] 。这些新表示方法的提出,为二型模糊集及系统的发展提供了一定的理论基础和潜在的应用。
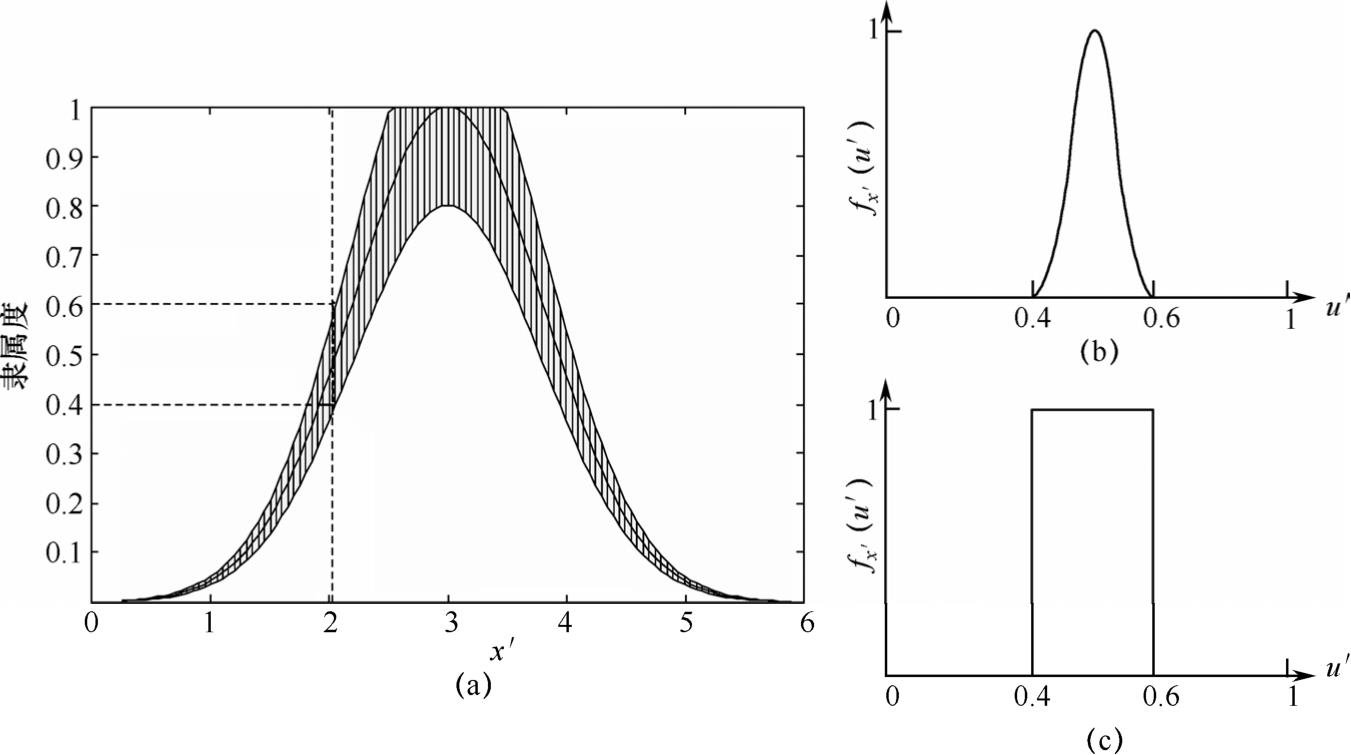
图1-1 普通二型模糊集和区间二型模糊集的特征
相对一型模糊系统,二型模糊系统多了降型这一步骤,其系统框图如图 1-2所示。降型是造成二型模糊系统复杂度增大的一个重要因素,最早的降型算法是由Karnik等人提出的KM迭代降型算法 [122] 。为了减少时间复杂度,一些新的降型算法被相继提出。Mendel针对对称区间二型模糊集,给出了新的质心计算方法,并可以减少 50%的计算量 [123] 。Mendel 等人给出了区间二型模糊集的质心闭公式,并研究了它的性质,为二型模糊系统的实际应用打下了理论基础[124]。进一步,Mendel从理论上证明了基于KM迭代降型算法求区间二型模糊集的质心单调收敛,保证了KM降型算法的合理性 [125] 。Wu在KM算法的基础上,研究了初始点及终止条件对算法性能的影响,提出了复杂度更低的 EKM算法 [126] 。Liu等人从理论上解释了EKM算法对初始点选择的依据,并将EKM算法扩展到三种形式的WEKM算法,证明了EKM算法为WEKM算法的特殊标现形式 [127] 。Chi-Yuan Yeh等人针对广义二型模糊集,提出了增强的降型算法,实验表明该算法能获得较好的效果 [128] 。Zhai 等人基于 a-平面理论提出了计算广义二型模糊质心的Centroid-Flow算法,仿真例子显示该算法可以大大减少时间复杂度 [129] 。
大量的实验表明,在不确定性场合,二型模糊系统具有超越一型模糊系统的能力。然而,关于二型模糊系统稳定性分析及控制器综合还研究得较少。
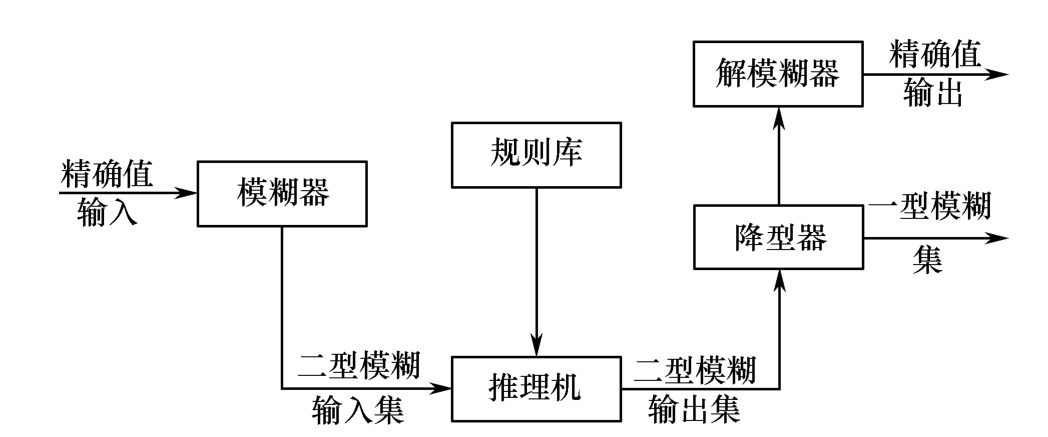
图1-2 二型模糊系统框图
二型模糊控制类似一型模糊控制,也可以分为Mamdani模糊控制和T-S模糊控制两类。相对于一型模糊控制,二型模糊控制只是将一型模糊逻辑推广到了二型模糊逻辑,其形式与一型模糊控制完全一样。二型Mamdani模糊控制可以提高处理不确定性的能力,在很多场合具有超越一型Mamdani模糊控制的潜力 [130] 。然而,二型Mamdani模糊控制仍然会遭遇一型Mamdani模糊控制遇到的困难,即如何以严格的数学方式分析闭环系统的稳定性仍然无法得到很好的解决。
二型T-S模糊模型保留了一型T-S模糊模型的优点,同时将一型模糊逻辑推广到了二型模糊逻辑,因此有潜力提高系统处理不确定性的能力。然而,关于二型T-S模糊模型的相关控制问题还研究得较少。文献[46]研究了两类区间二型 T-S 模糊控制系统的稳定性,第一类为被控对象和控制器均是区间二型T-S模糊模型的单输入-单输出系统;第二类为被控对象是一型T-S模糊模型,而控制器是区间二型T-S模糊模型的多输入-多输出系统。文献[47]和[48]分别研究了离散二型 T-S 模糊系统的稳定性分析和控制器设计,但获得的结果依赖于特殊类型隶属函数,这就限制了它的应用范围。文献[49]在文献[47]和[48]的基础上研究了连续二型T-S模糊系统的控制器综合,并且对隶属函数没有任何限制,这在一定程度上扩大了所获成果的应用范围。然而,文献[49]仅依据隶属函数的支撑信息推导反馈控制器的存在条件,该做法减少了系统分析的复杂度,但也导致了较多的保守性。此外,文献[46~49]提出的二型T-S 模糊模型不方便处理具有参数不确定的非线性系统或具有不确定模糊权重的一型T-S模糊系统。相对一型T-S模糊模型,二型T-S模糊模型的种类更多,依据不同的降型算法和前、后件的形式,可以分为不同类型的二型 T-S模糊模型 [40] 。文献[32]通过两个非线性函数定义了一种新的降型算法,基于该降型算法定义的区间二型 T-S 模糊模型可以很好地表示具有参数不确定的非线性系统或具有不确定模糊权重的一型T-S模糊系统。通过文献[32]所定义的区间二型 T-S 模糊模型,非线性系统中的不确定性信息可以被区间二型模糊集的FOU有效捕获。接下来,主要介绍区间二型T-S模糊模型的定义,以及通过一个例子表明它的意义,该部分内容可见文献[19,32]。区间二型T-S模糊模型可通过如下规则描述。
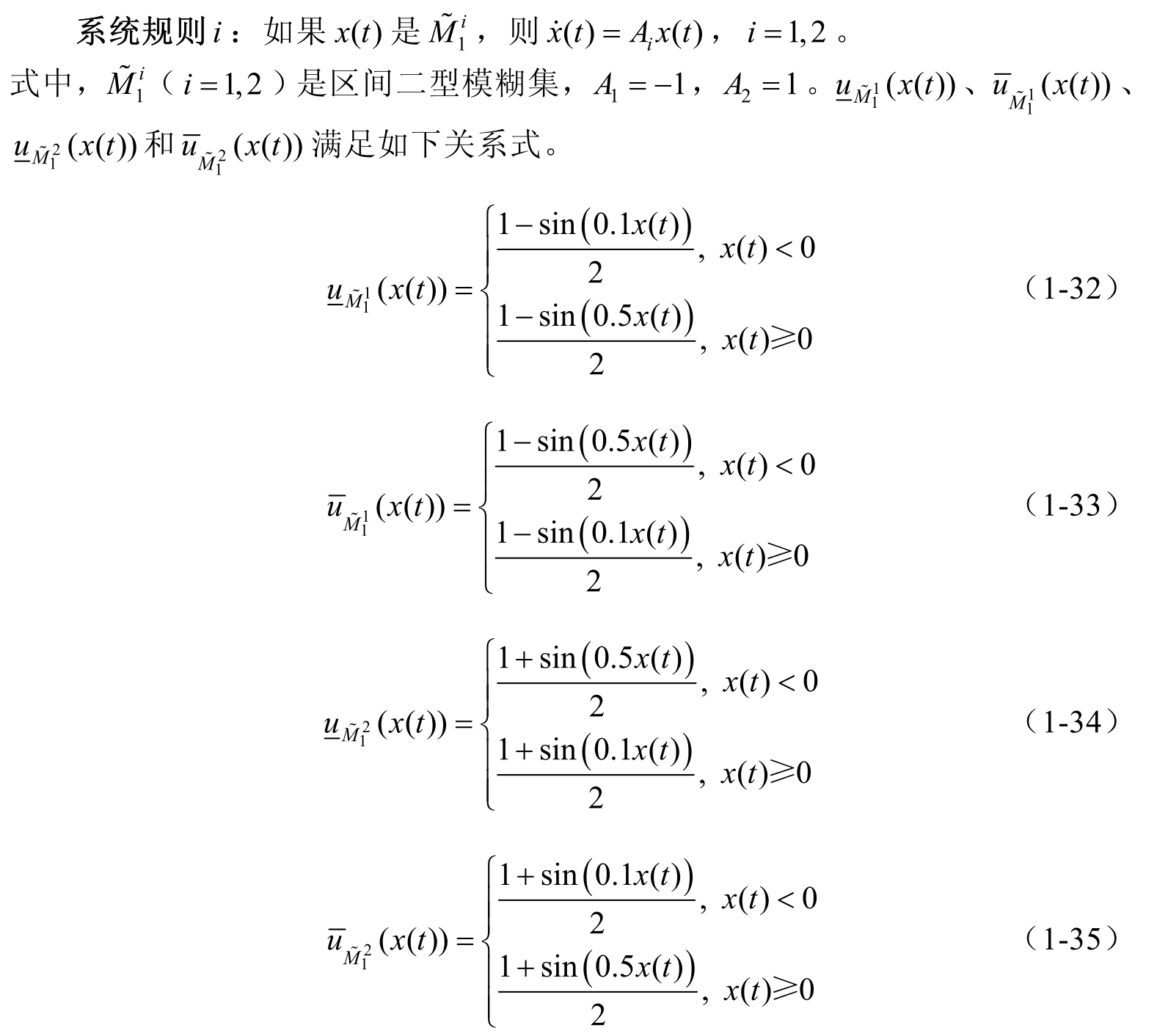
系统规则
i
:如果
f
1
(
x
(
t
))是
 ,且……,且
f
Ψ
(
x
(
t
))是
,且……,且
f
Ψ
(
x
(
t
))是
 ,则
,则

式中,
 为相关于函数
f
a
(
x
(
t
))的区间二型模糊集,
a
=1,2,…,
Ψ
,
i
=1,2,…,
p
;
为相关于函数
f
a
(
x
(
t
))的区间二型模糊集,
a
=1,2,…,
Ψ
,
i
=1,2,…,
p
;
 为状态向量;
为状态向量;
 为控制输入向量。
为控制输入向量。
第 i 条规则的激活强度可定义为如下的区间集。

其中

式(1-25)和式(1-26)中,
 (
a
=1,2,…,
Ψ
)分别表示下、上隶属度。
(
a
=1,2,…,
Ψ
)分别表示下、上隶属度。
全局的区间二型T-S模糊模型可定义为

其中
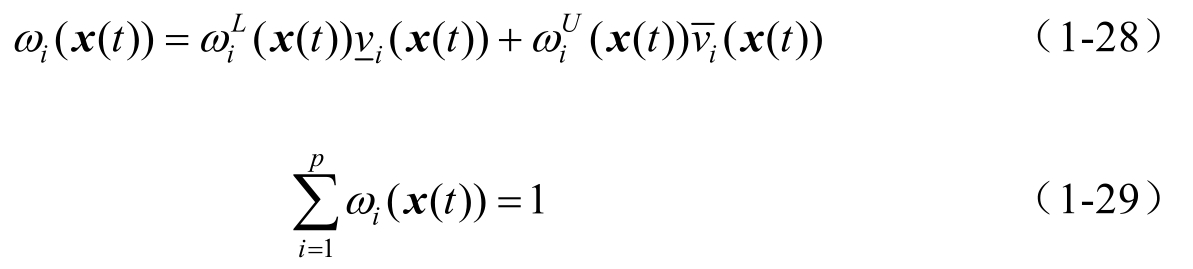
 是两个非线性函数,并且满足
是两个非线性函数,并且满足
 。
。
注 1.1
:式(1-28)通过两个非线性函数定义了一种新的降型方法。一旦
 都被确定为0.5,式(1-27)就退化为文献[39]中的区间二型T-S模糊模型。
都被确定为0.5,式(1-27)就退化为文献[39]中的区间二型T-S模糊模型。
注1.2
:由于考虑的非线性系统包含不确定参数,
 将会依赖于这些不确定参数。然而,
将会依赖于这些不确定参数。然而,
 在实际应用中不必知道,但确实存在。区间二型T-S模糊模型可以认为是设计区间二型模糊控制器的工具。
在实际应用中不必知道,但确实存在。区间二型T-S模糊模型可以认为是设计区间二型模糊控制器的工具。
下面的实例表明了区间二型 T-S 模糊模型式(1-27)在处理参数不确定性方面的作用。考虑如下的动态系统

式中,
x
(
t
)∈[-2,2]为系统状态,
 ,
b
(
t
)∈[0,1]是未知函数。显然,
a
(
x
(
t
))∈[0.1,0.5]。基于扇区非线性方法,上述的非线性系统可以表示为如下的一型T-S模糊模型。
,
b
(
t
)∈[0,1]是未知函数。显然,
a
(
x
(
t
))∈[0.1,0.5]。基于扇区非线性方法,上述的非线性系统可以表示为如下的一型T-S模糊模型。
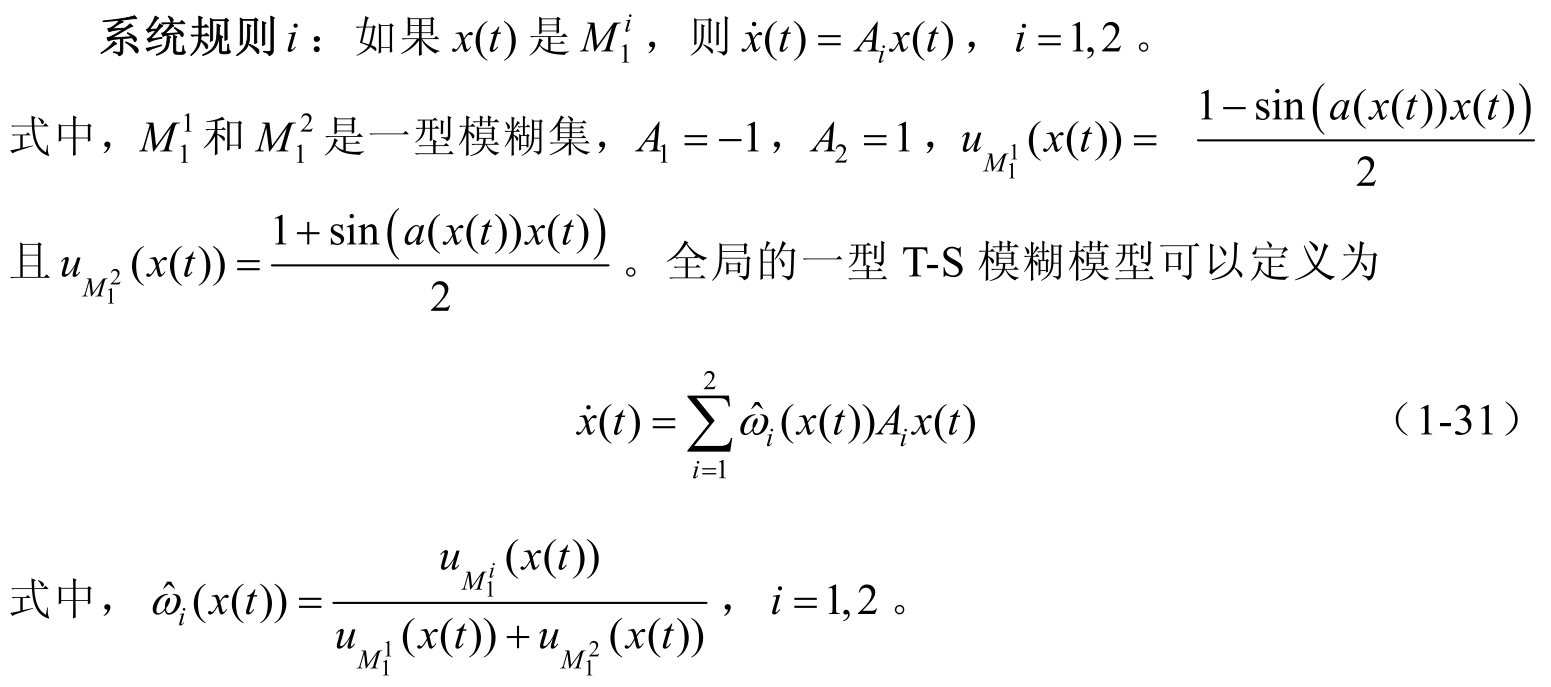
由于
a
(
x
(
t
))为不确定函数,因此式(1-31)中的模糊权重
 包含不确定信息。图 1-3 显示了
a
(
x
(
t
))在区间[0.1,0.5]取大量具体数值时,
包含不确定信息。图 1-3 显示了
a
(
x
(
t
))在区间[0.1,0.5]取大量具体数值时,
 的变化曲线。明显地,
的变化曲线。明显地,
 随着
a
(
x
(
t
))的变化将形成不同的曲线。
随着
a
(
x
(
t
))的变化将形成不同的曲线。
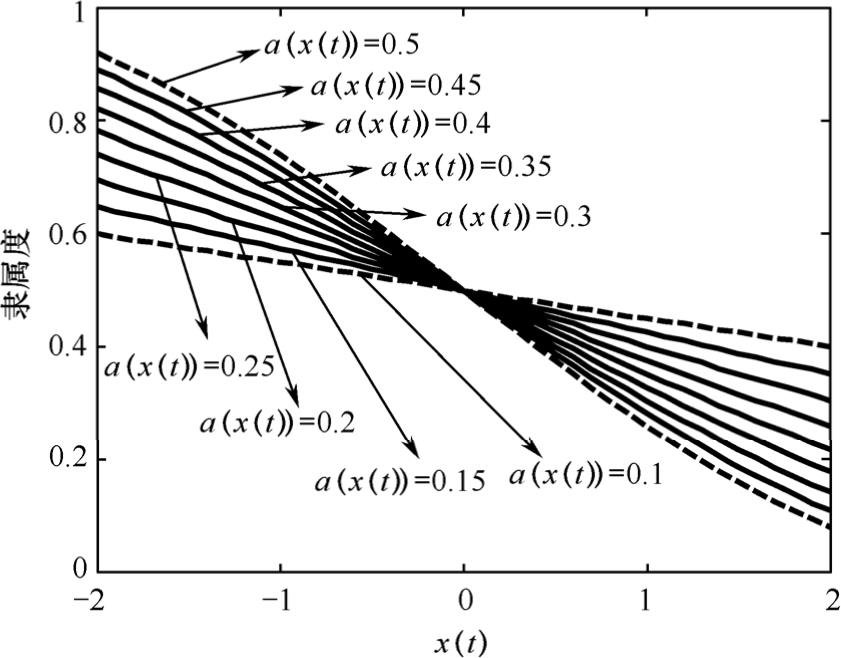
图1-3
a
(
x
(
t
))取不同数值时,
 的变化曲线
的变化曲线
接下来,用区间二型T-S模糊模型式(1-27)表示非线性系统式(1-30),其规则描述如下。
基于式(1-27),全局的区间二型T-S模糊模型可定义为

式中,
 且
且
 。类似地,对于其他的
x
(
t
)、
a
(
x
(
t
))和
。类似地,对于其他的
x
(
t
)、
a
(
x
(
t
))和
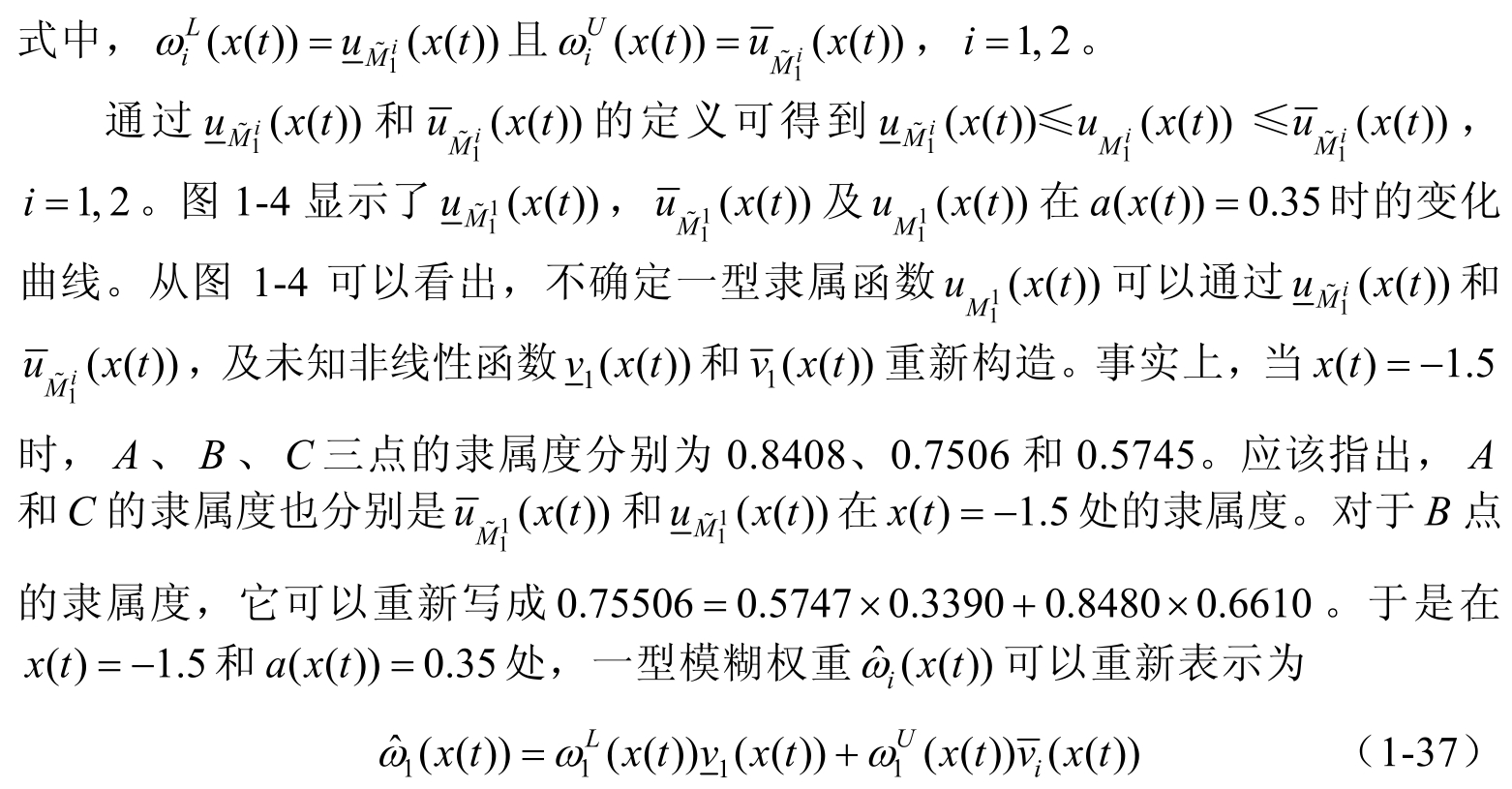
 ,式(1-37)也成立。也就是说,在FOU内的曲线都可以通过上、下隶属函数重新构造。
,式(1-37)也成立。也就是说,在FOU内的曲线都可以通过上、下隶属函数重新构造。
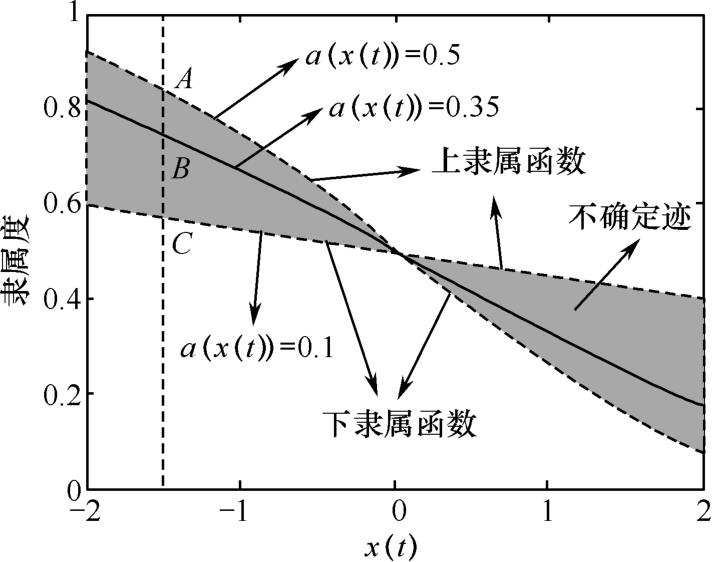
图1-4
 在
a
(
x
(
t
))=0.35时的变化曲线
在
a
(
x
(
t
))=0.35时的变化曲线
通过使用区间二型模糊集,参数不确定性成功地被上、下隶属函数捕获。于是区间二型 T-S 模糊模型式(1-27)可以用来表示具有参数不确定性的非线性系统式(1-30)。事实上,当
a
(
x
(
t
))取定某个具体的数值时,对应的非线性函数
 也会存在一个具体的数值,进而区间二型 T-S 模糊模型就退化为一型T-S模糊模型。当
a
(
x
(
t
))变化时,区间二型T-S模糊模型式(1-27)可以看成无限个具有确定隶属函数的一型 T-S 模糊模型的集合。因此,区间二型T-S模糊模型式(1-27)比一型T-S模糊模型具有更强的处理不确定性能力。
也会存在一个具体的数值,进而区间二型 T-S 模糊模型就退化为一型T-S模糊模型。当
a
(
x
(
t
))变化时,区间二型T-S模糊模型式(1-27)可以看成无限个具有确定隶属函数的一型 T-S 模糊模型的集合。因此,区间二型T-S模糊模型式(1-27)比一型T-S模糊模型具有更强的处理不确定性能力。
针对上述定义的区间二型 T-S 模糊系统,文献[32]基于 CQLF 研究了区间二型模糊状态反馈控制器的设计算法,并利用MFSD分析法,给出了保证闭环系统渐近稳定的LMI条件。然而,CQLF易导致控制器设计条件的保守性,因此文献[32]的结果仍具有改进的空间。文献[45]考虑了时滞区间二型T-S模糊系统的状态反馈控制问题,利用自由权矩阵技术,给出了时滞依赖镇定条件。文献[50]考虑了前提隶属函数不匹配的情形,也就是说控制器和被控对象不分享相同的前提变量。进一步,将上、下隶属函数的信息整合进稳定性分析中,文献[50]给出了区间二型模糊状态反馈控制器的存在条件。文献[51]探究了区间二型T-S模糊系统的滤波器设计问题,通过定义新型的性能标准,给出了区间二型模糊滤波器的存在条件。文献[52]研究了区间二型 T-S 模糊系统的故障诊断问题,通过定义区间二型模糊故障诊断滤波器,利用李雅普诺夫稳定性理论给出了保证故障诊断系统渐近稳定并满足 H ∞ 性能的LMI条件。文献[131]研究了具有执行器故障的区间二型T-S模糊系统的采样数据控制问题,利用李雅普诺夫稳定性理论,设计的区间二型模糊采样数据控制器能够保证闭环系统渐近稳定,并且可使得闭环系统在故障发生时仍然具有可靠性。文献[132]研究了非线性网络控制系统的区间二型模糊模型预测控制问题。利用区间二型T-S模糊系统表示具有参数不确定性的非线性系统,并在此基础上定义了区间二型模糊状态反馈模型预测控制器。通过介绍松弛矩阵变量,推导了具有较少保守性的设计条件。文献[133]通过考虑间歇数据丢包和量化因素,给出了区间二型T-S模糊系统的滤波器设计算法。上述结果在一定程度推动了区间二型T-S模糊系统的发展,然而如何进一步减少设计条件的保守性及研究区间二型T-S模糊系统的输出反馈控制策略,是有待进一步研究的课题。