
下载掌阅APP,畅读海量书库
立即打开



2-1 在图2-2-1的液位自动控制系统中,设容器横截面积为F,希望液位为c 0 。若液位高度变化率与液体流量差Q 1 -Q 2 成正比,试列写以液位为输出量的微分方程式。
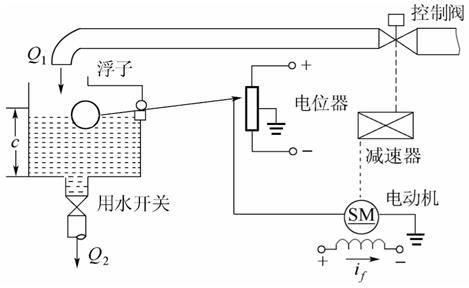
图2-2-1 液位自动控制系统原理图
解: 由题意知液位高度变化率与液体流量差Q 1 -Q 2 成正比,比例系数为容器横截面积F,即:
则以液位为输出量的微分方程式为:
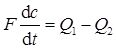
2-2 设机械系统如图2-2-2所示,其中x i 是输入位移,x o 是输出位移。试分别列写各系统的微分方程式。
图2-2-2 机械系统原理图
解: (1)系统(a)
根据力平衡方程,可得:
f 1 ( x i - x o )-f 2 x o =m x o (重力不计)
则系统的微分方程式为:
(2)系统(b)
弹簧K 1 与阻尼器之间取辅助点A,并设A点位移为x,方向向下。根据力平衡方程,可得:
K 1 (x i -x)=f( x - x o )
K 2 x 0 =f( x - x o )(重力不计)
消去中间变量x,化简得:
K 1 K 2 x o =K 1 f x -K 1 f x o =fK 1 x i -fK 1 x 0 -fK 2 x o
则系统的微分方程式为:

(3)系统(c)
根据力平衡方程,可得:
K 1 (x i -x o )+f( x i - x o )=K 2 x o
则系统的微分方程式为:

2-3 试证明图2-2-3(a)的电网络与图2-2-3(b)的机械系统有相同的数学模型。
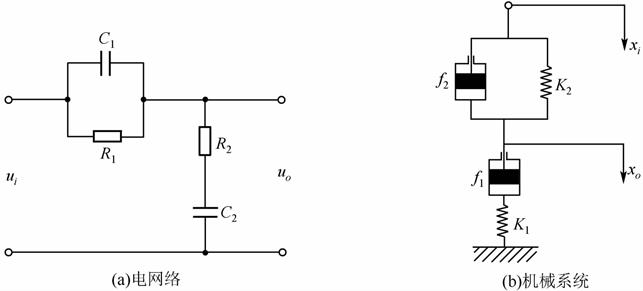
图2-2-3 电网络与机械系统原理图
证明:(1)系统(a)
由复数阻抗的方法,可得u o 和u i 关系为:
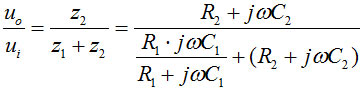
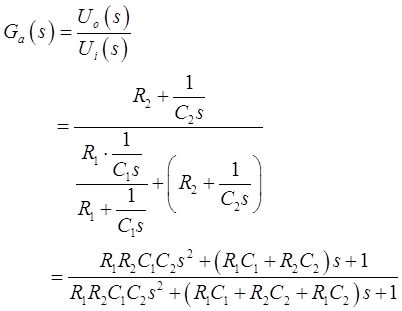
故得电网络的传递函数为
(2)系统(b)
在弹簧K 1 和阻尼器f 1 之间引入辅助点,设其位移为x,方向向下。根据力平衡方程,可得:
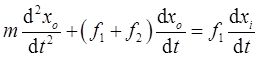
K 2 (x i -x o )+f 2 ( x i - x o )=f( x o - x )
K 1 x=f 1 ( x o - x )
对两式作零初始条件下拉氏变换得:
K 2 X i (s)-K 2 X o (s)+f 2 ·sX i (s)-f 2 ·sX o (s)=f 1 ·sX o (s)-f 1 ·sX(s)
K 1 X(s)=f 1 ·sX o (s)-f 1 ·sX(s)
消去中间变量X(s),则有:

则机械系统的传递函数为:
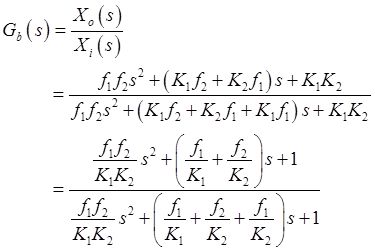
比较G a (s)、G b (s)可知:两传递函数的类型相同,即图中两系统有相同的数学模型。命题得证。
2-4 试分别列写图2-2-4中各无源网络的微分方程式。
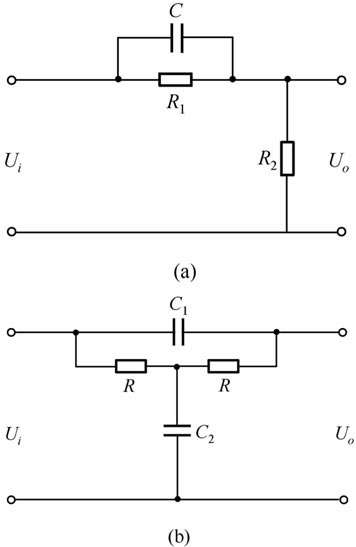
图2-2-4 无源网络电路图
解: (1)图(a):如图2-2-4(c),可设通过电阻R 1 的电流为i 1 (方向自左向右),通过电容C的电流为i 2 (方向自左向右),通过电阻R 2 的电流为i(方向自上向下)。
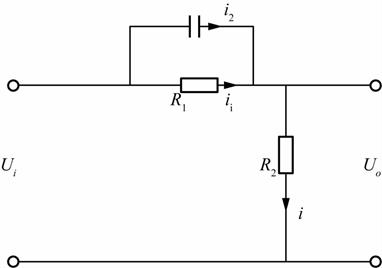
图2-2-4(c)
根据电压平衡可得:
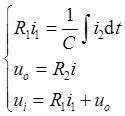
又因为i=i 1 +i 2 ,解得:i 1 =(u i -u o )/R 1 ,

整理可得图(a)所示的微分方程为:

(2)图(b):如图2-2-4(d),可设通过电阻R 1 的电流为i 1 (方向自左向右),通过电阻R的电流为i 2 (方向自右向左),通过电容C 1 的电流为i 2 (方向自左向右),通过电容C 2 的电流为i(方向自上向下)。
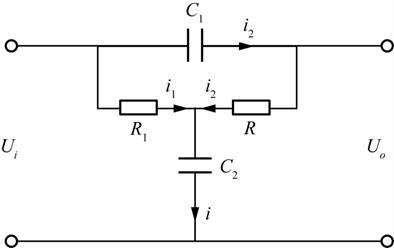
图2-2-4(d)
根据电压平衡可得:

又i=i 1 +i 2 ,解得:

整理可得图(b)所示的微分方程为:

2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态:
(1)2 x (t)+x(t)=t;
(2) x (t)+ x (t)+x(t)=δ(t);
(3) x (t)+2 x (t)+x(t)=1(t)。
解: (1)由零初始条件拉氏变换可得:

由拉氏反变换可得:x(t)=t-2+2e - 0.5t 。
由x(t)的表达式可得系统的特征根为:λ=-0.5。故该方程的运动模态为e - 0.5t 。
x(t)的曲线如图2-2-5所示。
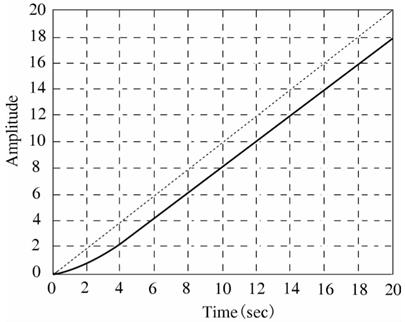
图2-2-5 单位斜坡响应曲线
(2)由零初始条件拉氏变换可得:
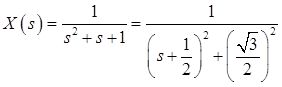
由拉氏反变换可得:

由x(t)的表达式可得系统的特征根为:
故该方程的运动模态为
x(t)曲线如图2-2-6所示。
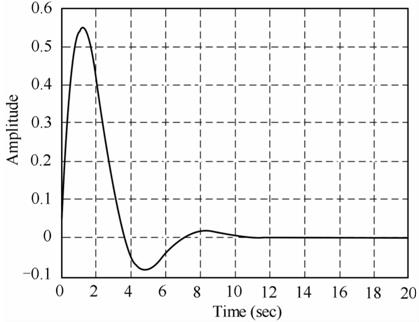
图2-2-6 单位脉冲响应曲线
(3)由零初始条件拉氏变换可得:

由拉氏反变换可得:x(t)=1-te - t -e - t 。
由x(t)的表达式可得系统的特征根为:λ 1 , 2 =-1,故该方程的运动模态为:te - t ,e - t 。
x(t)曲线如图2-2-7所示。
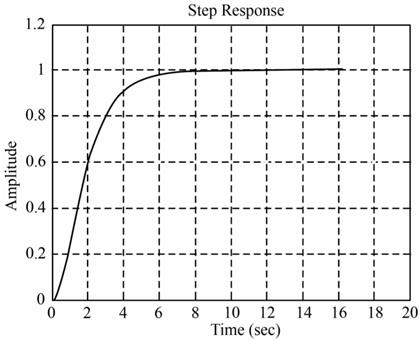
图2-2-7 单位阶跃响应曲线
2-6 在液压系统管道中,设通过阀门的流量Q满足如下流量方程:
 。式中,K为比例常数;P为阀门前后的压差。若流量Q与压差P在其平衡点(Q
0
,P
0
)附近做微小变化,试导出线性化流量方程。
。式中,K为比例常数;P为阀门前后的压差。若流量Q与压差P在其平衡点(Q
0
,P
0
)附近做微小变化,试导出线性化流量方程。
解: 在平衡点(Q 0 ,P 0 )处对流量Q泰勒展开,并取一次项近似可得

通过阀门的流量Q=Q 0 +ΔQ,由此可得,线性化流量方程为:
2-7 设弹簧特性由下式描述:F=12.65y 1.1 。其中,F是弹簧力;y是变形位移。若弹簧在变形位移0.25附近做微小变化,试推导ΔF的线性化方程。
解: y 0 =0.25处,F 0 =12.65×(0.25) 1.1 =2.75,故平衡点为(0.25,2.75)。在平衡点处对F进行泰勒展开,并取一次项近似可得:

由此可得,ΔF的线性化方程为:
2-8 设晶闸管三相桥式全控整流电路的输入量为控制角α,输出量为空载整流电压e d ,其间的关系为:
式中,
 是整流电压的理想空载值;试推导其线性化方程式。
是整流电压的理想空载值;试推导其线性化方程式。
解: 在α=α 0 处对e d 进行泰勒展开,然后取其一次项近似可得:

空载整流电压
则线性方程式为:

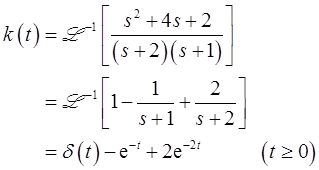
2-9 若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应c(t)=1-e - 2t +e - t 。试求系统的传递函数和脉冲响应。
解: 系统的输入的拉氏变换为:R(s)=1/s。
系统的输出响应为:c(t)=1-e - 2t +e - t 。
拉氏反变换得:

则系统的传递函数为:

单位脉冲信号R(s)=1,故求系统脉冲响应只需对系统传递函数做拉氏反变换,则
2-10 设系统传递函数为:
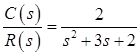
初始条件c(0)=-1, c (0)=0,求单位阶跃输入r(t)=1(t)时,系统的输出响应c(t)。
解: 系统的传递函数对应的微分方程为:
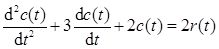
对上式两边同时作拉氏变换得:
[s 2 C(s)-sc(0)- c (0)]+3[sC(s)-c(0)]+2C(s)=2R(s)
代入初始条件c(0)=-1, c (0)=0,R(s)=1/s,可得:
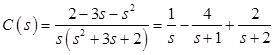
对上式作拉氏反变换,可得:
c(t)=1-4e - t +2e - 2t (t≥0)
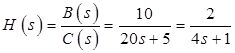
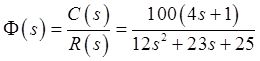
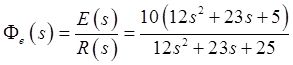
2-11 在图2-2-8中,已知G(s)和H(s)两方框相对应的微分方程分别是:
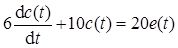
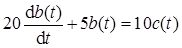
且初始条件均为零,试求传递函数C(s)/R(s)及E(s)/R(s)。
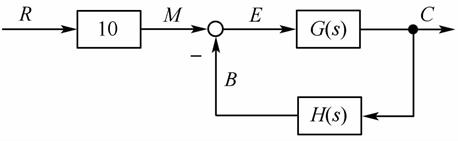
图2-2-8 题2-11系统结构图
解: 对题中微分方程两边作零初始条件下拉氏变换有:
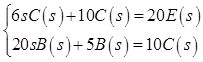
由上式可得:
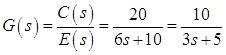
又由图2-2-8可得传递函数为:
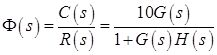
即

由图2-2-8同样可得传递函数:
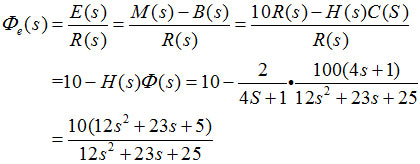
则传递函数分别为:
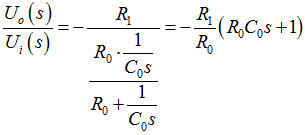
2-12 求图2-2-9所示有源网络的传递函数U o (s)/U i (s)。
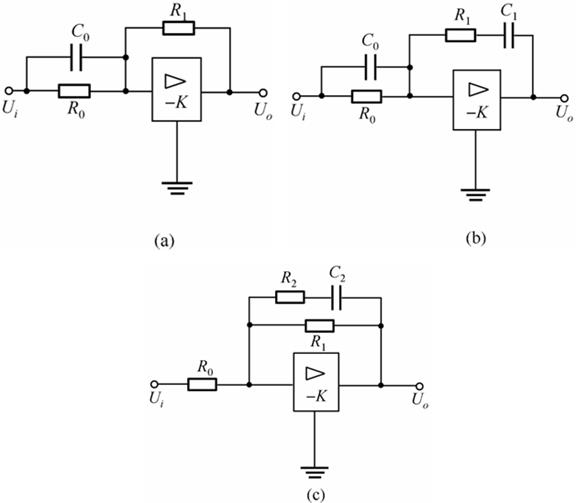
图2-2-9 有源网络电路图
解: (1)图(a)
由“虚短虚断”原理可知,
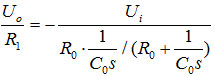
因此
(2)图(b)
由“虚短虚断”原理可知,
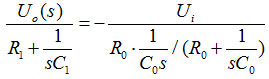
因此
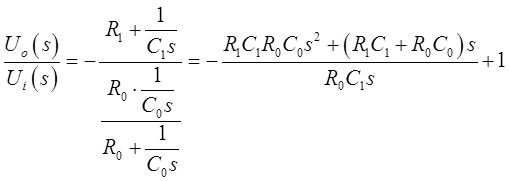
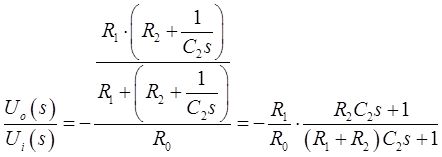
(3)图(c)
由“虚短虚断”原理可知,
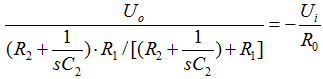
因此
2-13 由运算放大器组成的控制系统模拟电路如图2-2-10所示,试求闭环传递函数U o (s)/U i (s)。
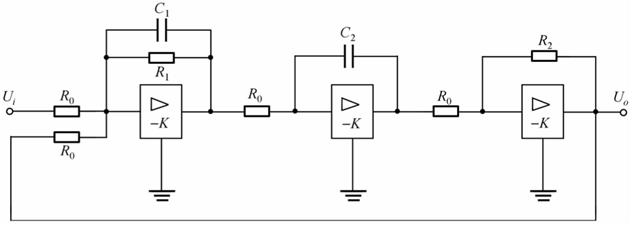
图2-2-10 控制系统模拟电路图
解: 设第一和第二个运算放大器的输出电压分别为U 1 和U 2 ,由题图可知
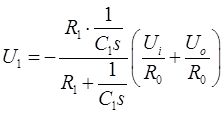
又由运算放大器“虚短虚断”原理知
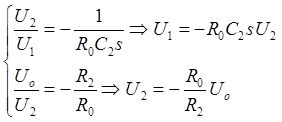
则有
即:
整理得闭环传递函数为:
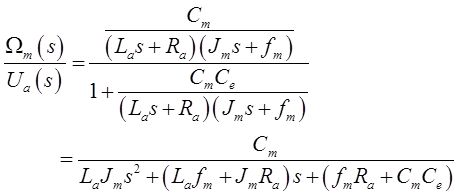
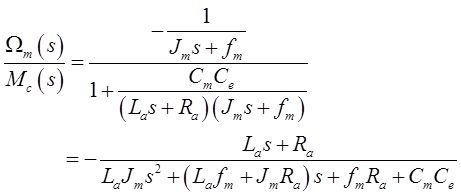
2-14 试参照(教材中)例2-2给出的电枢控制直流电动机的三组微分方程式,画出直流电动机的结构图,并由结构图等效变换求出电动机的传递函数Ω m (s)/U a (s)和Ω m (s)/M c (s)。
解: 电枢控制直流电动机的三组微分方程式分别为:

M m (t)=C m i a (t)

对上述三式分别进行零初始条件下拉氏变换得:
U a (s)-C e Ω m (s)=(L a s+R a )I a (s)
M m (s)=C m I a (s)
(J m s+f m )Ω m (s)=M m (s)-M c (s)
则可以画出直流电动机如图2-2-11所示。
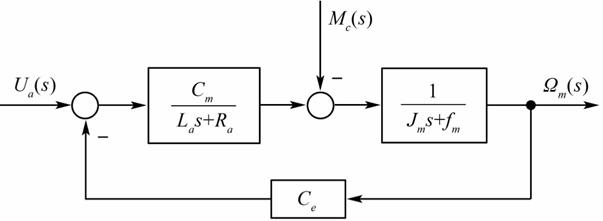
图2-2-11 直流伺服电机结构图
电动机的传递函数为:
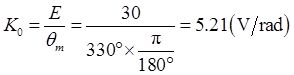
2-15 某位置随动系统原理方块图如图2-2-12所示。已知电位器最大工作角度θ max =330°,功率放大级放大系数为K 3 ,要求:
(1)分别求出电位器传递系数K 0 ,第一级和第二级放大器的放大系数K 1 和K 2 ;
(2)画出系统结构图;
(3)简化结构图,求系统传递函数Θ o (s)/Θ i (s)。
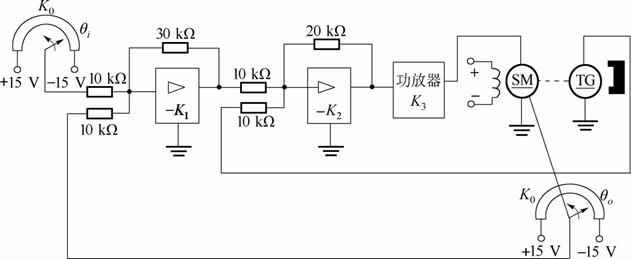
图2-2-12 位置随动系统原理图
解: (1)由题可知:
K 1 =30×10 3 /(10×10 3 )=3
K 2 =20×10 3 /(10×10 3 )=2
(2)视直流电动机为一阶惯性环节,时间常数为T m ,传递系数为K m ,可得直流电动机的传递函数为(忽略电枢电感的影响):
视测速发电机为比例环节,斜率为K t ,则其传递函数为:
系统的结构如图2-2-13所示。
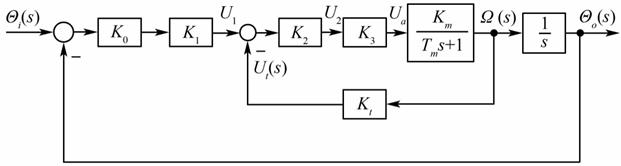
图2-2-13 位置随动系统结构图
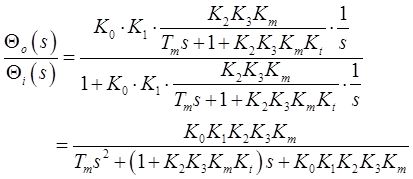
(3)系统结构图的简化如图2-2-14所示。

图2-2-14 系统结构图的简化
则系统的传递函数为:
2-16 设直流电动机双闭环调速系统的原理线路如图2-2-15所示,要求:
(1)分别求速度调节器和电流调节器的传递函数;
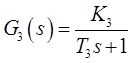
(2)画出系统结构图(设可控硅电路传递函数为K 3 /(T 3 s+1);电流互感器和测速发电机的传递系数分别为K 4 和K 5 ;直流电动机的结构图用题2-14的结果);
(3)简化结构图,求系统传递函数Ω(s)/U i (s)。
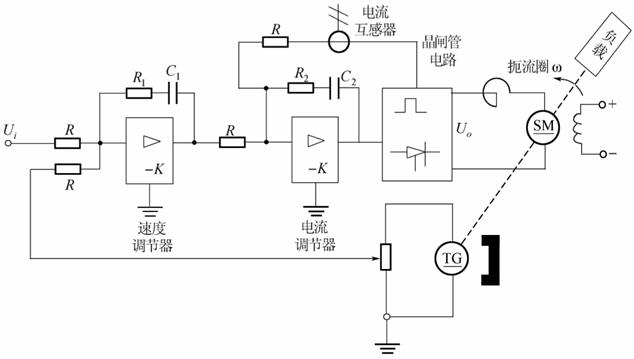
图2-2-15 直流电动机调速系统原理图
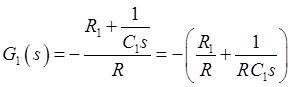
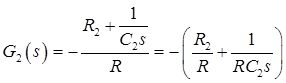
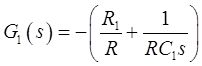
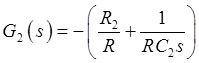
解: (1)由运算放大器“虚短虚断”原理,求得速度调节器和电流调节器的传递函数分别为:
(2)依据系统原理图画出直流电动机调速系统的结构图,如图2-2-16所示,注意电流反馈在结构图中的体现。
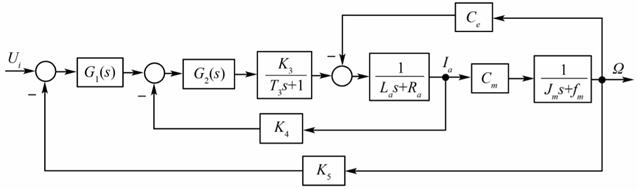
图2-2-16 直流电动机调速系统结构图
(3)对结构图依次化简,如图2-2-17所示,其中,图2-2-17(b)是经过反馈连接等效的。
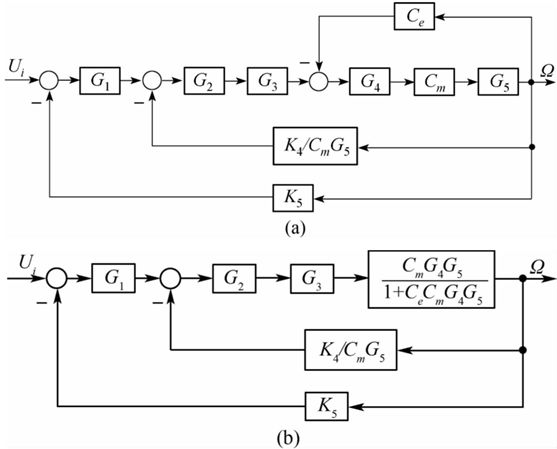
图2-2-17 电机调速系统结构图简化
由简化的结构图可得系统的传递函数

其中
2-17 已知控制系统结构图如图2-2-18所示,试通过结构图等效变换求系统传递函数C(s)/R(s)。
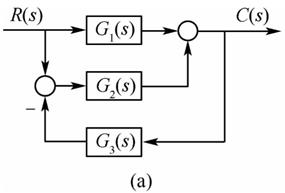
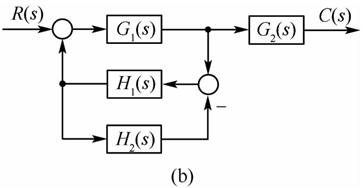
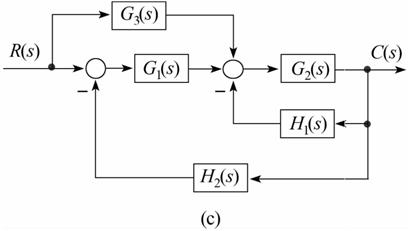
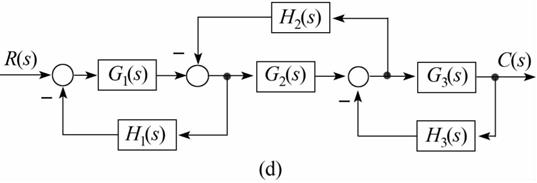
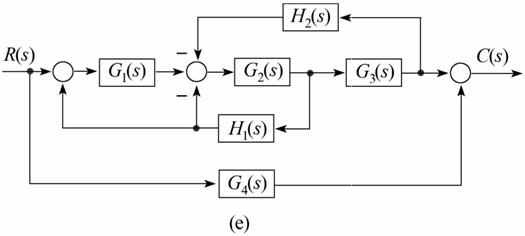
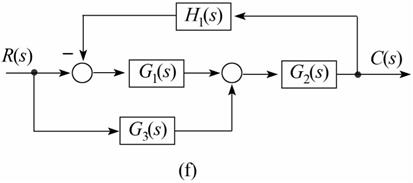
图2-2-18 题2-17系统结构图
解: (1)经比较点前移后,图(a)所示系统的简化结构图如图2-2-19所示,则系统传递函数为:
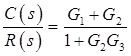
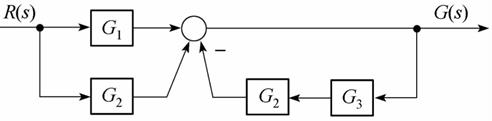
图2-2-19 简化结构图
(2)经反馈连接等效后,图(b)所示系统的简化结构图如图2-2-20所示。
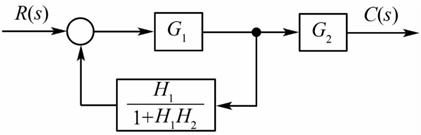
图2-2-20 简化结构图
则系统传递函数为:
(3)经比较点后移后,图(c)所示系统的简化结构图如图2-2-21(b)所示。
则系统传递函数为:
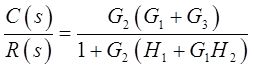
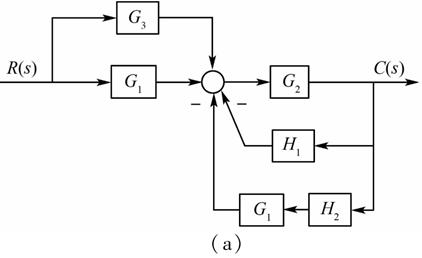
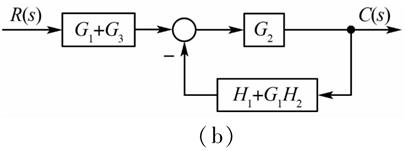
图2-2-21 简化结构图
(4)经比较点前移和引出点后移以及反馈连接后,图(d)所示系统的简化结构图如图2-2-22(b)所示。
则系统传递函数为:
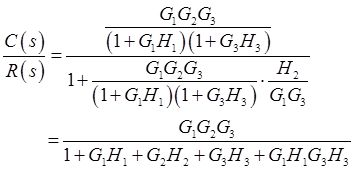
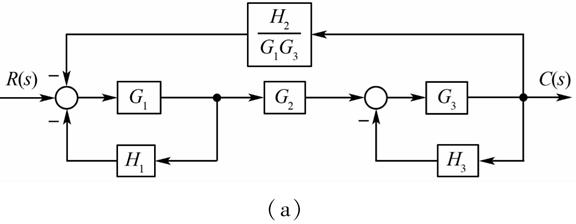
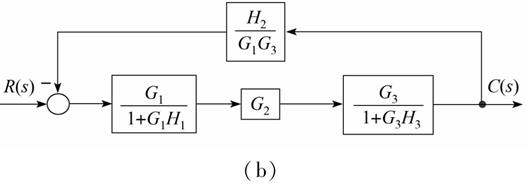
图2-2-22 简化结构图
(5)经比较点后移和引出点前移以及并联等效后,图(e)所示系统的简化结构图如图2-2-23所示.
则系统传递函数为:

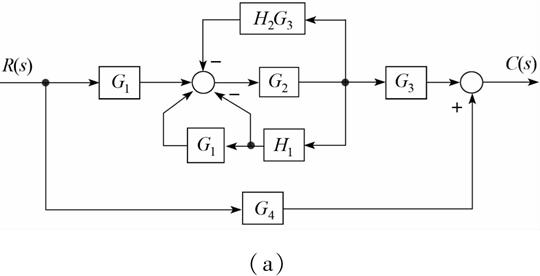
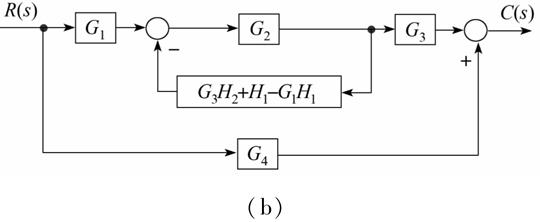
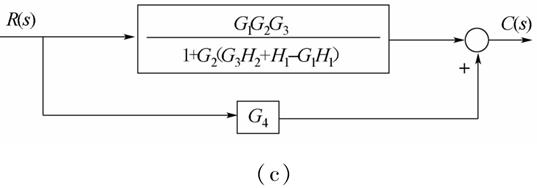
图2-2-23 简化结构图
(6)经比较点后移以及反馈连接和并联等效后,图(f)所示系统的简化结构图如图2-2-24所示。
则系统传递函数为:
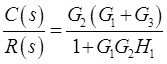
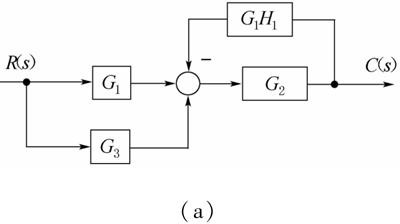
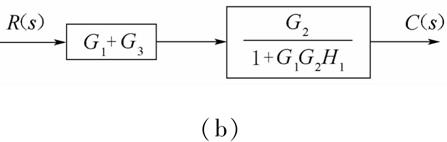
图2-2-24 简化结构图
2-18 试简化图2-2-25中的系统结构图,并求传递函数C(s)/R(s)和C(s)/N(s)。
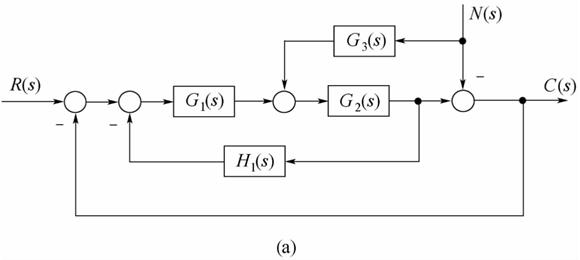
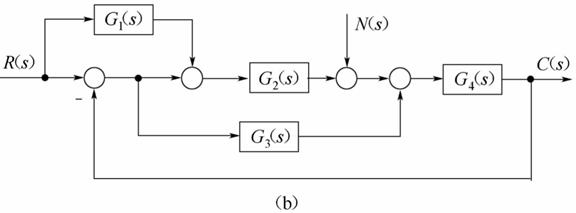
图2-2-25 题2-18系统结构图
解: (1)图(a)系统
令N(s)=0,并联等效简化结构图如图2-2-26(b)所示,则系统传递函数为:
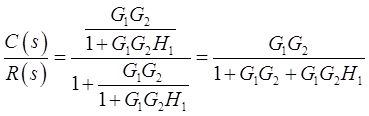
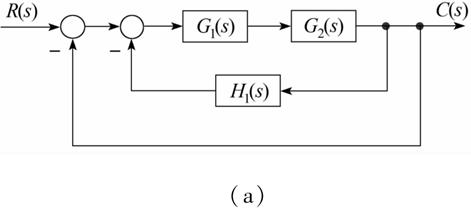
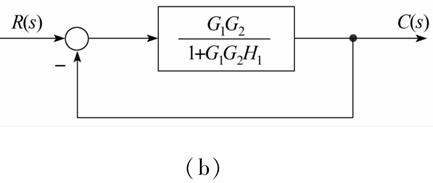
图2-2-26 简化结构图
令R(s)=0,移相加点简化结构图如图2-2-27(d)所示,则系统传递函数为:

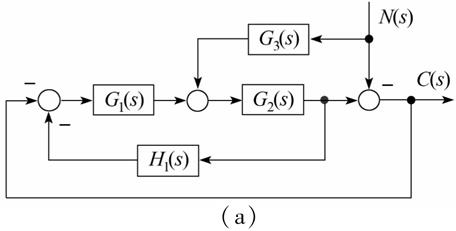
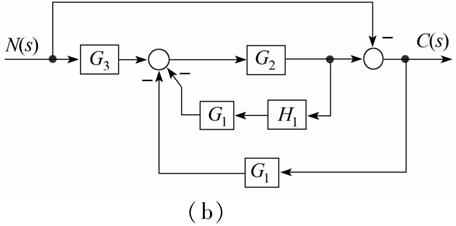
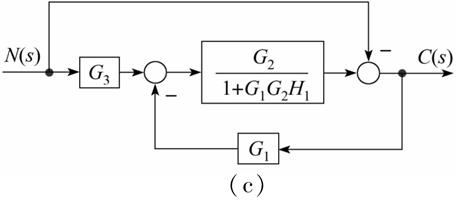
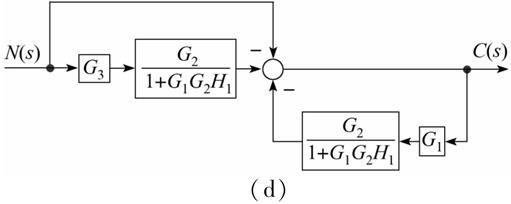
图2-2-27 简化结构图
(2)图(b)系统
令N(s)=0,简化结构图如图2-2-28(c)所示,则系统传递函数为:

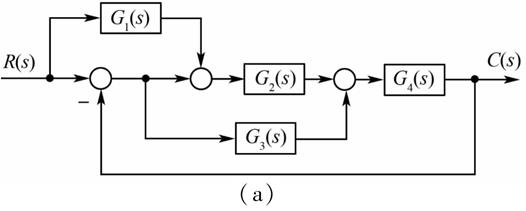
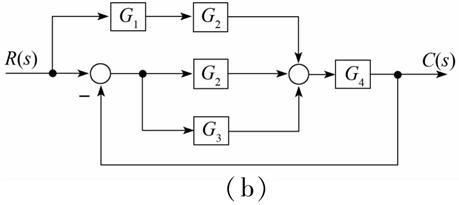
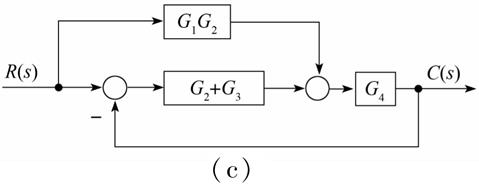
图2-2-28 简化结构图
令R(s)=0,旋转简化结构图如图2-2-29所示,则系统传递函数为:

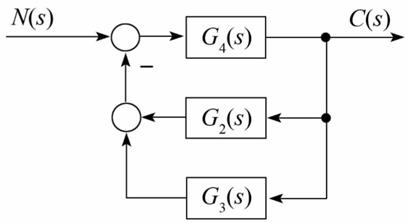
图2-2-29 简化结构图
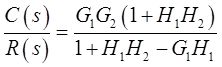
2-19 试绘制图2-2-30中各系统结构图对应的信号流图,并用梅森公式求各系统的传递函数C(s)/R(s)。
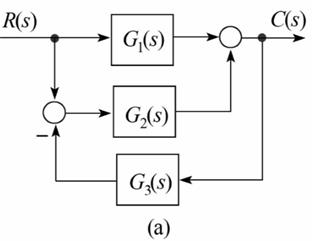
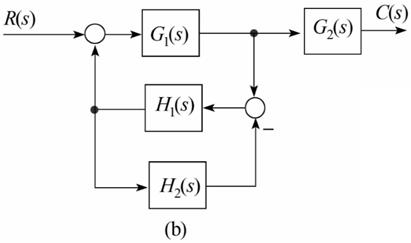
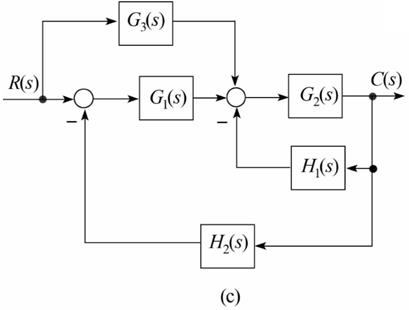
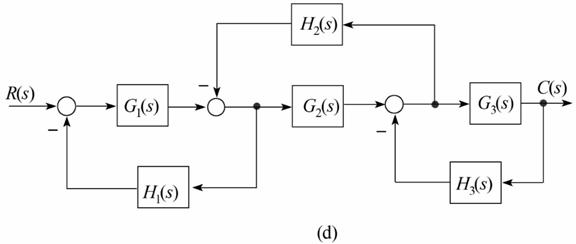
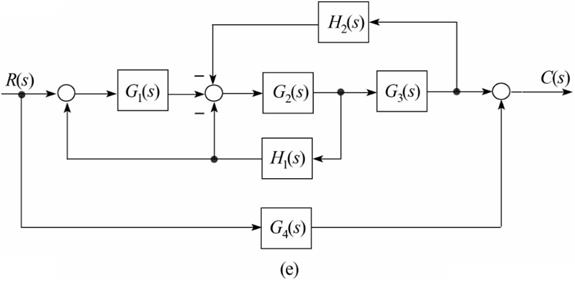
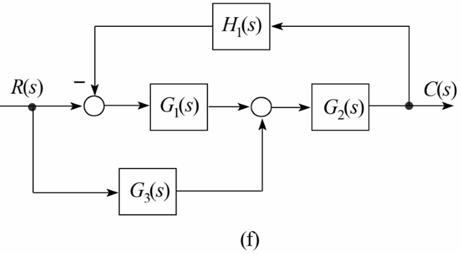
图2-2-30 系统结构图
解: (1)图(a)所示系统的信号流图如图2-2-31(a)所示,系统有两条前向通道,一个单独回路,即:
L 1 =-G 2 G 3 ,Δ=1-L 1 =1+G 2 G 3
p 1 =G 1 ,Δ 1 =1
p 2 =G 2 ,Δ 2 =1
由梅森增益公式得系统传递函数为:
(2)图(b)系统信号流图如图2-2-31(b)所示,系统有一条前向通道,两个互相接触的单独回路,即:
L 1 =G 1 H 1 ,L 2 =-H 1 H 2
Δ=1-(L 1 +L 2 )=1-G 1 H 1 +H 1 H 2
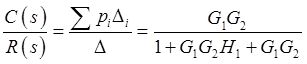
p 1 =G 1 G 2 ,Δ=1+H 1 H 2
由梅森增益公式得系统传递函数为:
(3)图(c)所示系统的信号流图如图2-2-31(c)所示,系统有两条前向通道,两个互相接触的单独回路,即:
L 1 =-G 2 H 1 ,L 2 =-G 1 G 2 H 2
Δ=1-(L 1 +L 2 )=1+G 2 H 1 +G 1 G 2 H 2
p 1 =G 1 G 2 ,Δ 1 =1
p 2 =G 2 G 3 ,Δ 2 =1
由梅森增益公式得系统传递函数为:
(4)图(d)系统信号流图如图2-2-31(d)所示,系统有一条前向通道,三个单独回路,其中一对回路互不接触,即
L 1 =-G 1 H 1 ,L 2 =-G 2 H 2 ,L 3 =-G 3 H 3 ,L 1 与L 3 不接触,L 1 L 3 =G 1 H 1 G 3 H 3
Δ=1-(L 1 +L 2 +L 3 )+L 1 L 3 =1+G 1 H 1 +G 2 H 2 +G 3 H 3 +G 1 H 1 G 3 H 3
p 1 =G 1 G 2 G 3 ,Δ=1
由梅森增益公式得系统传递函数为:

(5)图(e)所示系统的信号流图如图2-2-31(e)所示,系统有两条前向通道,三个回路,无不接触回路,即
L 1 =-G 2 H 1 ,L 2 =-G 2 G 3 H 2 ,L 3 =G 1 G 2 H 1
Δ=1-(L 1 +L 2 +L 3 )=1+G 2 H 1 +G 2 G 3 H 2 -G 1 G 2 H 1
p 1 =G 1 G 2 G 3 ,Δ 1 =1
p 2 =G 4 ,Δ 2 =1
由梅森增益公式得系统传递函数为:

(6)图(f)系统信号流图如图2-2-31(f)所示,系统有两条前向通道,一个单独回路,即:
L 1 =-G 1 G 2 H 1 ,Δ=1-L 1 =1+G 1 G 2 H 1
p 1 =G 1 G 2 ,Δ 1 =1
p 2 =G 2 G 3 ,Δ 2 =1
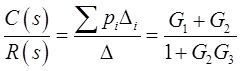
由梅森增益公式得系统传递函数为:
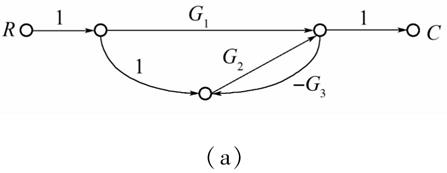
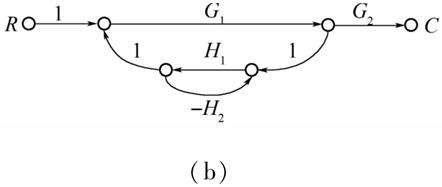
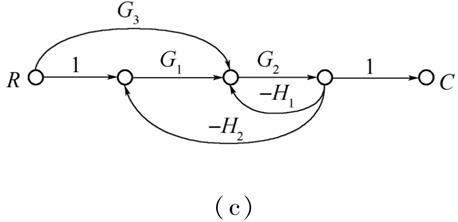
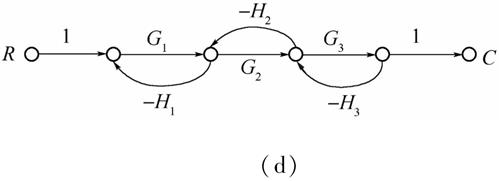
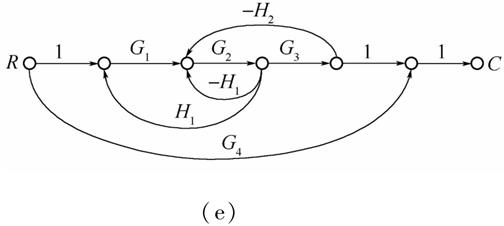
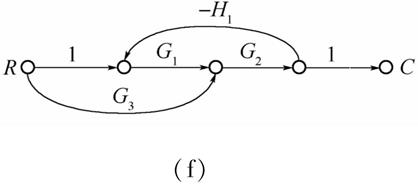
图2-2-31 系统信号流图
2-20 画出图2-2-32各系统结构图对应的信号流图,并用梅森增益公式求传递函数C(s)/R(s)和C(s)/N(s)。
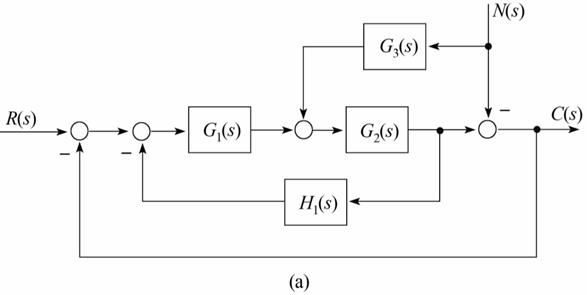
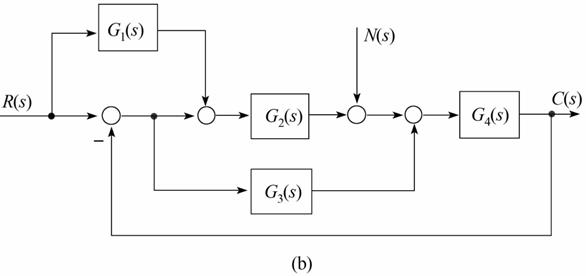
图2-2-32 系统结构图
解: (1)图(a)系统信号流图如图2-2-33(a)所示。
①求C(s)/R(s)
系统有一条前向通道,两个互相接触的单独回路,即:
L 1 =-G 1 G 2 H 1 ,L 2 =-G 1 G 2
Δ=1-(L 1 +L 2 )=1+G 1 G 2 H 1 +G 1 G 2
p 1 =G 1 G 2 ,Δ 1 =1
由梅森增益公式得系统传递函数为:
②求C(s)/N(s)
系统有两条前向通道,两个互相接触的单独回路,即:
L 1 =-G 1 G 2 H 1 ,L 2 =-G 1 G 2
Δ=1-(L 1 +L 2 )=1+G 1 G 2 H 1 +G 1 G 2
p 1 =-1,L 1 与p 1 不接触,Δ 1 =1+G 1 G 2 H 1
p 2 =G 2 G 3 ,Δ 2 =1
由梅森增益公式得系统传递函数为:

(2)图(b)所示系统的信号流图如图2-2-33(b)所示。
①求C(s)/R(s)
系统有三条前向通道,两个互相接触的单独回路,即:
L 1 =-G 2 G 4 ,L 2 =-G 3 G 4
Δ=1-(L 1 +L 2 )=1+G 2 G 4 +G 3 G 4
p 1 =G 2 G 4 ,Δ 1 =1
p 2 =G 1 G 2 G 4 ,Δ 2 =1
p 3 =G 3 G 4 ,Δ 3 =1
由梅森增益公式得系统传递函数为:

②求C(s)/N(s)
系统有一条前向通道,两个互相接触的单独回路,即:
L 1 =-G 2 G 4 ,L 2 =-G 3 G 4
Δ=1-(L 1 +L 2 )=1+G 2 G 4 +G 3 G 4
p 1 =G 4
Δ 1 =1
由梅森增益公式得系统传递函数为:
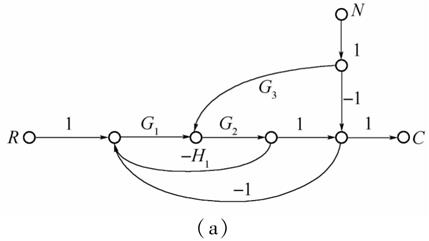
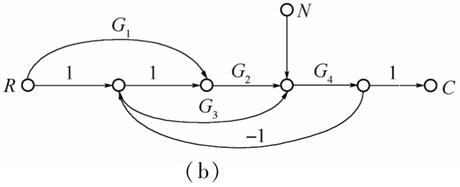
图2-2-33 系统信号流图
2-21 试绘制图2-2-34中系统结构图对应的信号流图,并用梅森增益公式求传递函数C(s)/R(s)和E(s)/R(s)。
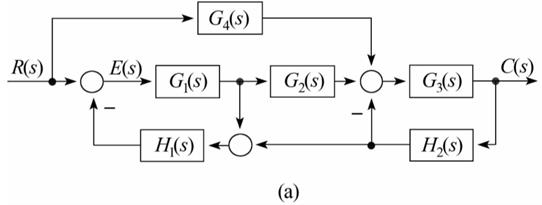
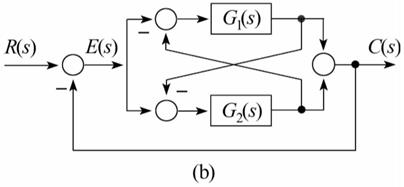
图2-2-34 题2-21系统结构图
解: (1)系统(a)信号流图如图2-2-35(a)所示。
①求C(s)/R(s)
系统有两条前向通道,三个单独回路,其中一对回路互不接触,即:
L 1 =-G 1 H 1 ,L 2 =-G 3 H 2 ,L 3 =-G 1 G 2 G 3 H 1 H 2
L 1 与L 2 不接触,L 1 L 2 =G 1 G 3 H 1 H 2 ,则
Δ=1-(L 1 +L 2 +L 3 )+L 1 L 2 =1+G 1 H 1 +G 3 H 2 +G 1 G 2 G 3 H 1 H 2 +G 1 G 3 H 1 H 2
p 1 =G 1 G 2 G 3 ,Δ 1 =1
p 2 =G 3 G 4 ,L 1 与p 2 不接触,Δ 2 =1+G 1 H 1
由梅森增益公式得传递函数为:

②求E(s)/R(s)
系统有两条前向通道,三个单独回路,其中一对回路互不接触,即:
L 1 =-G 1 H 1 ,L 2 =-G 3 H 2 ,L 3 =-G 1 G 2 G 3 H 1 H 2
L 1 与L 2 不接触,L 1 L 2 =G 1 G 3 H 1 H 2 ,则
Δ=1-(L 1 +L 2 +L 3 )+L 1 L 2 =1+G 1 H 1 +G 3 H 2 +G 1 G 2 G 3 H 1 H 2 +G 1 G 3 H 1 H 2
p 1 =1,L 2 与p 1 不接触,Δ 1 =1+G 3 H 2 ;p 2 =-G 3 G 4 H 1 H 2 ,Δ 2 =1
由梅森增益公式得传递函数为:

(2)系统(b)的信号流图如图2-2-35(b)所示。
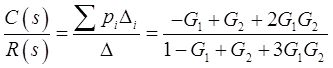
①求C(s)/R(s)
系统有四条前向通道,五个单独回路,无不接触回路,即:
L 1 =G 1 ,L 2 =-G 2 ,L 3 =-G 1 G 2 ,L 4 =-G 1 G 2 ,L 5 =-G 1 G 2
Δ=1-(L 1 +L 2 +L 3 +L 4 +L 5 )=1-G 1 +G 2 +3G 1 G 2
p 1 =-G 1 ,Δ 1 =1;p 2 =G 2 ,Δ 2 =1
p 3 =G 1 G 2 ,Δ 3 =1;p 4 =G 1 G 2 ,Δ 4 =1
由梅森增益公式得传递函数为:
②求E(s)/R(s)
系统有一条前向通道,五个单独回路,没有互不接触回路,即:
L 1 =G 1 ,L 2 =-G 2 ,L 3 =-G 1 G 2 ,L 4 =-G 1 G 2 ,L 5 =-G 1 G 2
Δ=1-(L 1 +L 2 +L 3 +L 4 +L 5 )=1-G 1 +G 2 +3G 1 G 2
p 1 =1,L 5 与p 1 不接触,Δ 1 =1+G 1 G 2
由梅森增益公式得传递函数为:
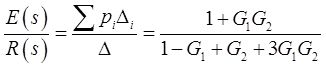
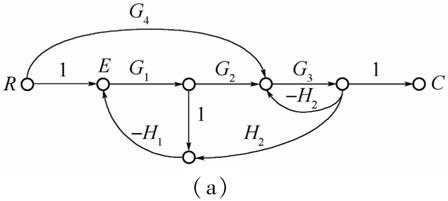
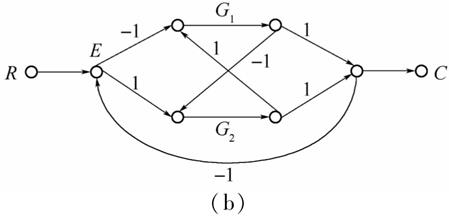
图2-2-35 系统信号流图
2-22 试用梅森增益公式求图2-2-36中各系统信号流图的传递函数C(s)/R(s)。
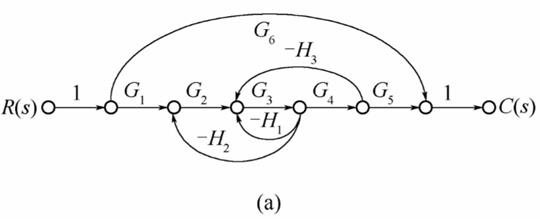
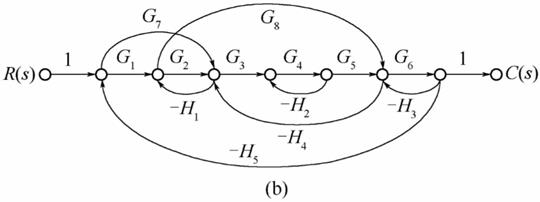
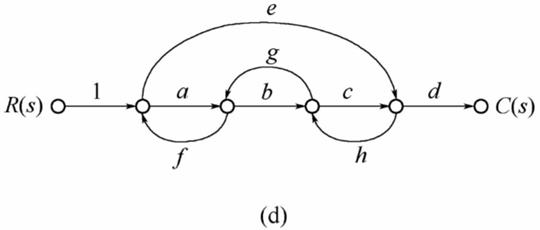
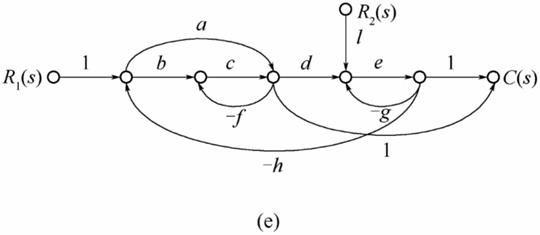
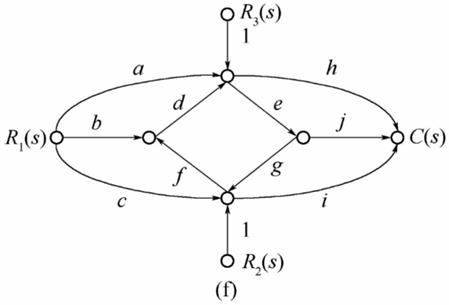
图2-2-36 题2-22系统信号流图
解: (1)系统(a)
有两条前向通道,三个单独回路,无不接触回路,即:
L 1 =-G 3 H 1 ,L 2 =-G 2 G 3 H 2 ,L 3 =-G 3 G 4 H 3
Δ=1-(L 1 +L 2 +L 3 )=1+G 3 H 1 +G 2 G 3 H 2 +G 3 G 4 H 3
p 1 =G 1 G 2 G 3 G 4 G 5 ,Δ 1 =1
p 2 =G 6 ,L 1 ,L 2 ,L 3 与p 2 不接触,Δ 2 =Δ
由梅森增益公式得系统传递函数为:

(2)系统(b)
有四条前向通道,九个单独回路,其中六对回路互不接触,一组三回路互不接触,即:
九个单独回路
L 1 =-G 2 H 1 ,L 2 =-G 4 H 2 ,L 3 =-G 6 H 3 ,L 4 =-G 3 G 4 G 5 H 4
L 5 =-G 1 G 2 G 3 G 4 G 5 G 6 H 5 ,L 6 =-G 3 G 4 G 5 G 6 G 7 H 5 ,L 7 =-G 1 G 6 G 8 H 5
L 8 =G 6 G 7 G 8 H 1 H 5 ,L 9 =G 8 H 1 H 4
六对互不接触的回路
L 1 L 2 =G 2 H 1 G 4 H 2 ,L 1 L 3 =G 2 H 1 G 6 H 3 ,L 2 L 3 =G 4 H 2 G 6 H 3
L 2 L 7 =G 4 H 2 G 1 G 6 G 8 H 5 ,L 2 L 8 =-G 4 H 2 G 6 G 7 G 8 H 1 H 5 ,L 2 L 9 =-G 4 H 2 G 8 H 1 H 4
一组互不接触的三回路
L 1 L 2 L 3 =-G 2 H 1 G 4 H 2 G 6 H 3
Δ=1+G 2 H 1 +G 4 H 2 +G 6 H 3 +G 3 G 4 G 5 H 4 +G 1 G 2 G 3 G 4 G 5 G 6 H 5 +G 3 G 4 G 5 G 6 G 7 H 5 +G 1 G 6 G 8 H 5 -G 6 G 7 G 8 H 1 H 5 -G 8 H 1 H 4 +G 2 H 1 G 6 H 3 +G 4 G 2 (G 2 H 1 +G 6 H 3 +G 1 G 6 G 8 H 5 -G 6 G 7 G 8 H 1 H 5 -G 8 H 1 H 4 +G 2 H 1 G 6 H 3 )
p 1 =G 1 G 2 G 3 G 4 G 5 G 6 ,Δ 1 =1
p 2 =G 3 G 4 G 5 G 6 G 7 ,Δ 2 =1
p 3 =G 1 G 6 G 8 ,Δ 3 =1+G 4 H 2
p 4 =-G 6 G 7 G 8 H 1 ,Δ 4 =1+G 4 H 2
由梅森增益公式得系统传递函数为:

(3)系统(c)
有两条前向通道,三个单独回路,二对互不接触回路,即:
L 1 =-0.5,L 2 =-1×10,L 3 =-1×2
L 1 与L 2 不接触,L 1 L 2 =5,L 1 与L 3 不接触,L 1 L 3 =1,则
Δ=1-(L 1 +L 2 +L 3 )+L 1 L 2 +L 1 L 3 =1+0.5+10+2+5+1=19.5
p 1 =5×10=50,L 1 与p 1 不接触,Δ 1 =1+0.5=1.5。
p 2 =2×10=20,L 2 与p 2 不接触,Δ 2 =1+10=11。
由梅森增益公式得系统传递函数为:

(4)系统(d)
有两条前向通道,四个单独回路,一对互不接触回路,即:
L 1 =af,L 2 =bg,L 3 =ch,L 4 =efgh,L 1 与L 3 不接触,L 1 L 3 =afch,则
Δ=1-(L 1 +L 2 +L 3 +L 4 )+L 1 L 3 =1-af-bg-ch-efgh+acfh
p 1 =abcd,Δ 1 =1;p 2 =de,L 2 与p 2 不接触,Δ 2 =1-bg
由梅森增益公式得系统传递函数为:

(5)系统(e)
当R 1 作用时有四条前向通道,四个单独回路,一对互不接触回路,即:
L 1 =-cf,L 2 =-eg,L 3 =-adeh,L 4 =-bcdeh
L 1 与L 2 不接触,L 1 L 2 =cfeg,则
Δ=1-(L 1 +L 2 +L 3 +L 4 )+L 1 L 2 =1+cf+eg+adeh+bcdeh+cefg
p 1 =bcde,Δ 1 =1;p 2 =ade,Δ 2 =1
p 3 =bc,L 2 与p 3 不接触,Δ 3 =1+eg
p 4 =a,L 2 与p 4 不接触,Δ 4 =1+eg
由梅森增益公式得系统传递函数为:

当R 2 作用时有三条前向通道,四个单独回路,一对互不接触回路,即:
L 1 =-cf,L 2 =-eg,L 3 =-adeh,L 4 =-bcdeh
L 1 与L 2 不接触,L 1 L 2 =cfeg,则
Δ=1-(L 1 +L 2 +L 3 +L 4 )+L 1 L 2 =1+cf+eg+adeh+bcdeh+cefg
p 1 =el,L 1 与p 1 不接触,Δ 1 =1+cf;p 2 =-aehl,Δ 2 =1;p 3 =-dcelh,Δ 3 =1
由梅森增益公式得系统传递函数为:

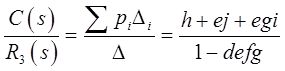
(6)系统(f)
当R 1 作用时,有九条前向通道,一个单独回路,即:
L 1 =defg,Δ=1-L 1 =1-defg
p 1 =ah,p 2 =aej,p 3 =aegi,p 4 =bdh,p 5 =bdej,p 6 =bdegi,p 7 =ci,p 8 =cdfh,p 9 =cdefj
Δ i =1(i=1,…,9),由梅森增益公式得系统传递函数为:

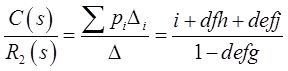
当R 2 作用时有三条前向通道,一个单独回路,即:
L 1 =defg,Δ=1-L 1 =1-defg
p 1 =i,p 2 =dfh,p 3 =defj
Δ i =1(i=1,2,3),由梅森增益公式得系统传递函数为:
当R 3 作用时有三条前向通道,一个单独回路,即:
L 1 =defg,Δ=1-L 1 =1-defg
p 1 =h,p 2 =ej,p 3 =egi
Δ i =1(i=1,2,3),由梅森增益公式得系统传递函数为:
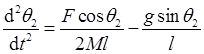
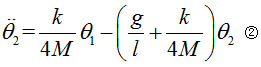
2-23 图2-2-37所示为双摆系统,双摆悬挂在无摩擦的旋轴上,并且用弹簧把它们的中点连在一起。假定:摆的质量为M;摆杆长度为l,摆杆质量不计;弹簧置于摆杆的l/2处,其弹性系数为k;摆的角位移很小,sinθ,cosθ均可进行线性近似处理;当θ 1 =θ 2 时,位于杆中间的弹簧无变形,且外力输入f(t)只作用于左侧的杆。若令a=g/l+k/(4M),b=k/(4M),要求:
(1)列写双摆系统的运动方程;
(2)确定传递函数Θ 1 (s)/F(s);
(3)画出双摆系统的结构图和信号流图。
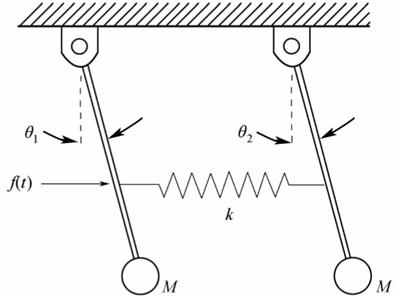
图2-2-37 双摆系统示意图
解: (1)弹簧所受到的压力为:F=k·(l/2)·(sinθ 1 -sinθ 2 )。
左边摆杆的受力方程为:

即:

右边摆杆的受力方程为:

即:
且有如下近似关系:
sinθ 1 =θ 1 ,cosθ 1 =1
sinθ 2 =θ 2 ,cosθ 2 =1
将F=k·(l/2)·(sinθ 1 -sinθ 2 )分别代入左右摆杆的受力方程,可得:

将a=g/l+k/(4M),b=k/(4M)代入①②两个方程,并令ω 1 = θ 1 ,ω 2 = θ 2 ,得到双摆系统的运动方程为:

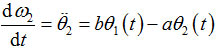
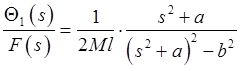
(2)对运动方程作零初始条件下的拉氏变换得:


消去中间变量,化简得传递函数为:
(3)系统结构图和信号流图如图2-2-38及图2-2-39所示。
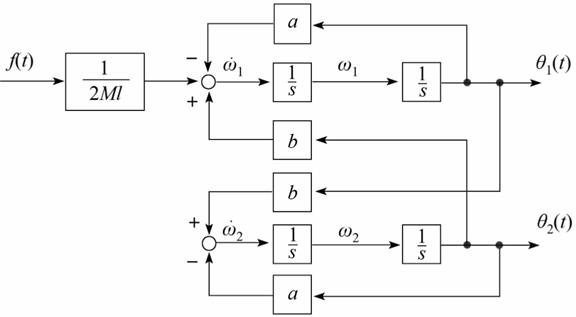
图2-2-38 双摆系统结构图
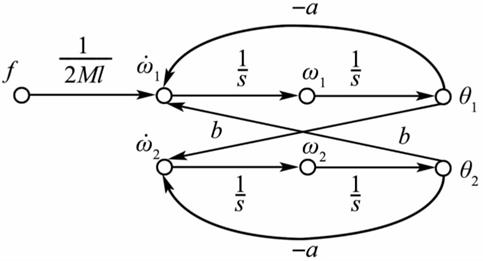
图2-2-39 双摆系统信号流图
为便于观察,将图2-2-39改为如图2-2-40所示。
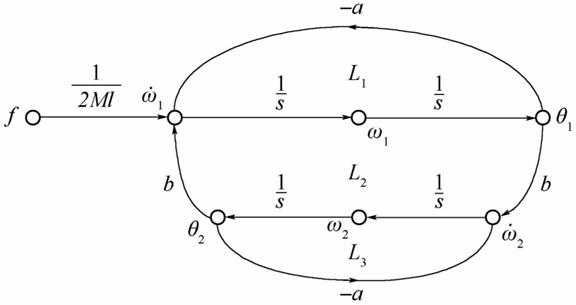
图2-2-40 双摆系统信号流图
由图2-2-40可知,系统有一条前向通道,三个单独回路,其中L 1 和L 3 互不接触,即:
L 1 =-a/s 2 ,L 2 =b 2 /s 4 ,L 3 =-a/s 2
Δ=1-(L 1 +L 2 +L 3 )+L 1 L 3
p 1 =1/(2Mls 2 ),Δ 1 =1-L 3
应用梅森增益公式得:

2-24 城市生态系统的多回路模型可能包括下列变量:城市人口数量(变量节点P),现代化程度(变量节点M),流入城市人数(变量节点C),卫生设施(变量节点S),疾病数量(变量节点D),单位面积的细菌数(变量节点B),单位面积的垃圾数(变量节点G)等。假定各变量节点间遵循下列因果关系:
(1)P→G→B→D→P;
(2)P→M→C→P;
(3)P→M→S→D→P;
(4)P→M→S→B→D→P。
各变量节点间支路增益的符号待确定。例如,改变卫生设施后,将减少单位面积的细菌数,因此S到B传输的支路增益应该为负。试确定各支路增益的正负,用恰当的符号,如a,b,c,d,e,f,g,h,k,m等表示支路增益,画出这些因果关系的信号流图,并回答在所给出的四个回路中,哪个是正反馈回路,哪个是负反馈回路?
解: 信号流图如图2-2-41所示,依据实际城市生态确定支路增益符号,回路总增益的正负决定了它是正反馈回路还是负反馈回路。因此在给出的四个回路中,第一个回路为负反馈回路,其余为正反馈回路。
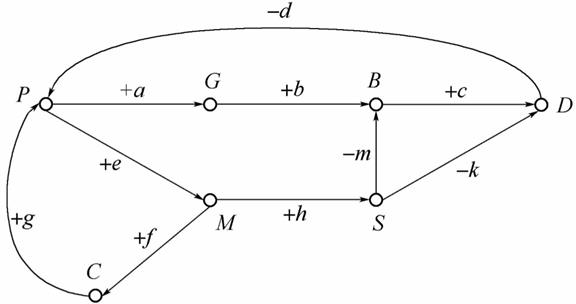
图2-2-41 生态系统的信号流图