
下载掌阅APP,畅读海量书库
立即打开



本章考点:根据系统结构图或信号流图求解系统传递函数。
1 建立控制系统微分方程的步骤
(1)依据系统原理图,结合相应的学科规律,分别列写组成系统各元件的微分方程;
(2)消去中间变量,得到描述系统输出量与输入量关系的微分方程。
【注意】 ①信号传递的单向性;②后级元件对前级元件的负载效应。
2 线性系统的基本特性
(1)叠加性:对于一个y=f(t)的系统,若满足f(t 1 +t 2 )=f(t 1 )+f(t 2 ),则称系统具有叠加性;
(2)齐次性:对于一个y=f(t)的系统,若满足f(Kt)=Kf(t),则称系统具有齐次性。
同时满足齐次性和叠加性的系统称线性系统。
3 线性定常微分方程的求解——拉氏变换法
(1)考虑初始条件,对微分方程中的各项分别进行拉氏变换;
(2)求解代数方程,得到输出量拉氏变换函数的表达式;
(3)对输出量拉氏变换表达式进行反变换,得到时域表达式,即为所求微分方程的解。
4 非线性微分方程的线性化
(1)在一定条件下,可直接将一些元件视为线性元件;
(2)切线法或小偏差法,即在一个很小的范围内,将非线性特性用一段直线来代替。
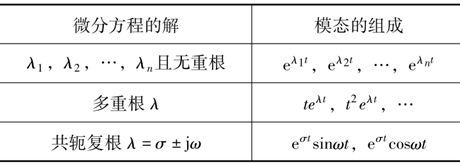
5 运动的模态(见表2-1-1)
表2-1-1 运动的模态
1 传递函数及其性质
线性定常系统的传递函数,定义为零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。数学表达式为:

性质:
(1)m≤n,且所有的系数均为实数;
(2)传递函数表示输出量与输入量之间的关系,只与系统(或元件)本身和结构参数有关,但不反映系统内部的任何信息。
【注意】 传递函数是一确定系统的固有性质,与输入输出无关。此处是考研常考且考生易混淆的概念之一。
(3)传递函数与微分方程可相互转化;(微分算符d/dt与复数s相互置换即可)
(4)传递函数的拉氏反变换是单位脉冲响应,反映系统的运动特性。
2 传递函数的零点和极点
传递函数的分子多项式和分母多项式因式分解后可得到如下形式:
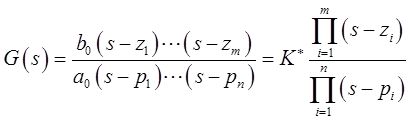
则式中,z i 为传递函数的零点;p j 为传递函数的极点;系数K * =b 0 /a 0 称为传递系数或根轨迹增益。
【注意】 传递函数的这种表示形式在频率法中使用较多。
3 传递函数的零极点对输出的影响
(1)传递函数的极点就是系统微分方程的特征根,决定了系统响应中自由运动的模态;
(2)传递函数的零点影响各模态在响应中所占的比重,从而影响响应曲线的形状。
1 结构图的等效变换和简化
(1)串联(如图2-1-1)

图2-1-1 方框串联连接及其简化
(2)并联(如图2-1-2)
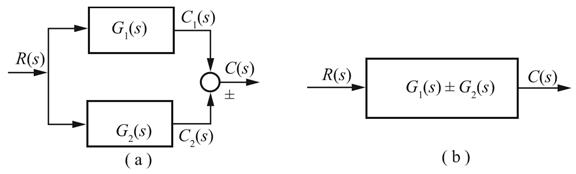
图2-1-2 方框并联连接及其简化
(3)反馈(如图2-1-3)
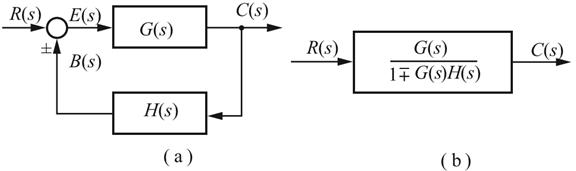
图2-1-3 方框反馈连接及其简化
(4)比较点和引出点的移动
①注意在移动前后必须保持信号的等效性,而且比较点和引出点一般不宜交换其位置;
②“-”号可以沿信号线越过方框,但不可越过比较点和引出点。
2 信号流图的组成及性质
(1)组成
①源节点;②阱节点;③前向通路:从源节点到阱节点之间,与每个节点仅相交一次的通道;④回路:起于并终于同一节点,且与其他任何节点相交不多于一次的闭合通道;⑤不接触回路:相互之间无公共节点的回路。
(2)信号流图的基本性质
①节点标志系统的变量,每个节点标志的变量是所有流向该节点的信号之和,而从同一节点流向各支路的信号均用该节点的变量表示;
②支路相当于乘法器,信号流经支路时,被乘以支路增益而变换为另一信号;
③信号在支路上只能沿箭头单向传递,即只有因果关系;
④对给定系统,其节点变量的设置是任意的,因此信号流图不是唯一的。
3 信号流图求解传递函数步骤(Mason公式)
(1)找出信号流图中的所有单独回路,并确定其中的不接触回路;
(2)求出流图特征式Δ=1-∑L a +∑L b L c -∑L d L e L f +…,其中∑L a 表示所有单独回路增益之和,∑L b L c 表示每两个互不接触的回路增益的乘积之和,∑L d L e L f 表示每三个互不接触的回路增益乘积之和,……依次类推;
(3)找出信号流图中的所有前向通路,并求其增益p k ;
(4)去掉信号流图的特征式与第k条前向通路接触的所有回路的回路增益项,得到流图余因子式Δ k ;
(5)由式
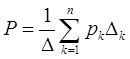 求出系统的传递函数,其中n为前向通路总数。
求出系统的传递函数,其中n为前向通路总数。
4 闭环系统的传递函数
一个典型的反馈控制系统的结构图如图2-1-4所示。
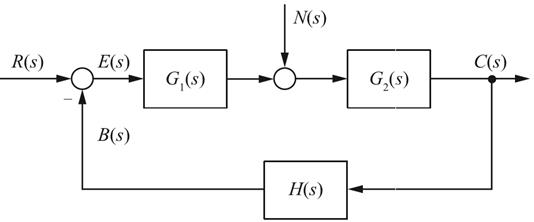
图2-1-4 反馈控制系统的典型结构图
(1)输入信号作用下的闭环传递函数
输入信号作用下,即R(s)≠0,N(s)=0时,有:

(2)扰动作用下的闭环传递函数
扰动信号作用下,即R(s)=0,N(s)≠0时,有:

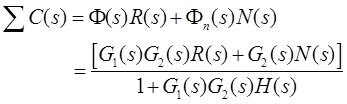
(3)输入和扰动同时作用下的闭环传递函数
输入信号和扰动信号同时作用下,系统的输出量为:
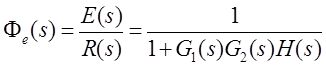
(4)闭环系统的误差传递函数
闭环系统在输入信号和扰动作用下,以误差信号E(s)作为输出量时的传递函数称为误差传递函数,如下:

【注意】
在考研试题求系统稳态误差的问题中,除简单题目能使用静态误差系数法外,最基本的方法是利用误差传递函数求解
 (拉氏变换终值定理)。此外,在输入信号为正弦激励f(t)=Asin(ωt+φ)时,只能使用误差传递函数法e
ss
(∞)=A|Φ
e
(jω)|sin[ωt+φ+∠Φ
e
(jω)]来求解稳态误差,此时输出c(t)的求解亦同理。
(拉氏变换终值定理)。此外,在输入信号为正弦激励f(t)=Asin(ωt+φ)时,只能使用误差传递函数法e
ss
(∞)=A|Φ
e
(jω)|sin[ωt+φ+∠Φ
e
(jω)]来求解稳态误差,此时输出c(t)的求解亦同理。