
下载掌阅APP,畅读海量书库
立即打开



本章考点:二阶欠阻尼系统动态性能指标,系统稳定性分析(劳斯判据、赫尔维茨判据),稳态误差计算。
1 典型输入信号
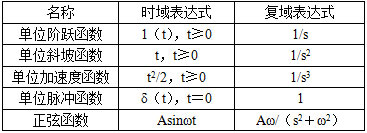
控制系统中常用的一些基本输入信号如表3-1-1所示。
表3-1-1 控制系统典型输入信号
2 动态性能与稳态性能
(1)动态性能指标
t r ——上升时间,h(t)从终值10%上升到终值90%所用的时间,有时也取t=0第一次上升到终值的时间(对有振荡的系统);
t p ——峰值时间,响应超过中值到达第一个峰值的时间;
t s ——调节时间,进入误差带且不超出误差带的最短时间;
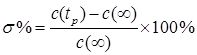
σ%——超调量,
(2)稳态性能
稳态误差e ss 是系统控制精度或抗扰动能力的一种度量,是指t→∞时,输出量与期望输出的偏差。
1 一阶系统的数学模型
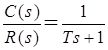
一阶系统的传递函数为:
2 一阶系统的时间响应
一阶系统对典型输入信号的时间响应如表3-1-2所示。
表3-1-2 一阶系统对典型输入信号的时间响应
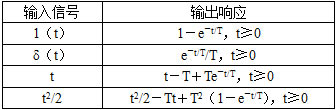
由表可知,线性定常系统的一个重要特性:系统对输入信号导数的响应,就等于系统对该输入信号响应的导数;或者,系统对输入信号积分的响应,就等于系统对该输入信号响应的积分,而积分常数由零输出初始条件确定。
1 二阶系统的数学模型
二阶系统的传递函数的标准形式为:
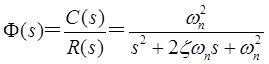
其中,ω n 称为自然频率;ζ称为阻尼比。
2 欠阻尼二阶系统(重点)
(1)当0<ζ<1时,为欠阻尼二阶系统,此时有一对共轭复根:

(2)单位阶跃响应

式中,
 ,或者β=arccosζ,
,或者β=arccosζ,
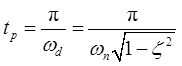
各性能指标如下:
t r =(π-β)/ω d
3 临界阻尼二阶系统
(1)当ζ=1时,为临界阻尼二阶系统,此时s 1 =s 2 =-ω n 。
(2)单位阶跃响应

4 过阻尼二阶系统
(1)当ζ>1时,为过阻尼二阶系统。
(2)单位阶跃响应
【注意】 隐藏考点是非零初始条件下二阶系统的响应过程,内容较为简单,但解题时考生容易忽略初始条件不为零的二阶系统响应过程,请注意甄别。
闭环主导极点:距虚轴最近的极点,远小于其他极点距虚轴的距离(一般取十倍以上),周围无闭环零点,相应的响应分量在系统的时间响应中起主导作用,则此闭环极点为闭环主导极点。
【扩展】 在高阶系统时域分析时,一般使用主导极点和偶极子的概念使其降阶为二阶系统再处理。
偶极子:一对零极点相距足够近,远远小于其他极点到虚轴的距离(一般取十倍以上),则可近似认为该对零极点对系统响应过程不产生影响,且称该对零极点构成一对偶极子。
1 线性系统稳定的充要条件
闭环系统特征方程的所有根均具有负实部;或者说,闭环系统传递函数的所有极点均位于s左半平面。
【注意】 特征方程系数均大于零,可不必列劳斯表。
2 劳斯——赫尔维茨稳定判据
(1)赫尔维茨判据
设系统特征方程为:
D(s)=a 0 s n +a 1 s n - 1 +…+a n - 1 s+a n =0,a 0 >0
使线性系统稳定的必要条件是:D(s)中各项系数为正数。
其系数构成的主行列式为:

则系统稳定的充要条件是:主行列式及其顺序主子式均大于零。
当系统方程的次数较高时,赫尔维茨判据计算将会很复杂,不太适用。
(2)劳斯判据(重点)
系统稳定的充要条件是劳斯表中的第一列为正。劳斯表中第一列正负号改变的次数是特征方程正实部根的数目。劳斯表如表3-1-3所示。
表3-1-3 劳斯表
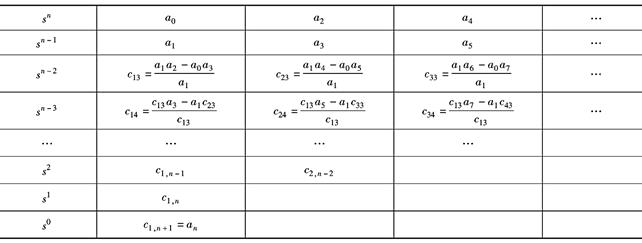
注意劳斯判据的特殊情况:
①某行第一列项为零,而其余各项不为零,或不全为零。此时可以用(s+a)乘以原特征方程,其中a为任意正数,再对新的特征方程应用劳斯判据。
②劳斯表中出现全零行。这种情况表明特征方程中存在绝对值相同但符号相异的特征根,此时可用全零行上面一行的系数构造一个辅助方程F(s)=0,并将辅助方程对s求导,用所得导数方程的系数取代全零行,便可继续计算。
1 误差与稳态误差
(1)误差:如图3-1-1所示的控制系统中,E(s)=R(s)-H(s)C(s)称为误差信号,简称误差。
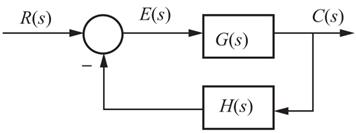
图3-1-1 控制系统
(2)稳态误差:误差信号e(t)的稳态分量
 称为稳态误差。
称为稳态误差。

2 系统的稳态误差计算
(1)系统的型别
设系统的开环传递函数为:
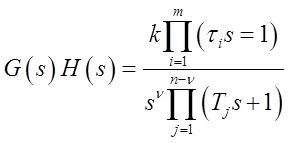
式中,k为开环增益;τ i 和T j 为时间常数;ν是纯积分环节的次数,称系统的型别。
(2)典型输入信号下各型别系统的稳态误差计算
在阶跃信号、斜坡信号、加速度信号三种典型输入信号下,各型别系统的稳态误差如表3-1-4所示。
表3-1-4 典型输入信号作用下的稳态误差
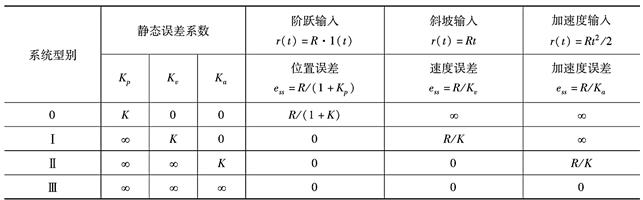
【注意】 速度误差和加速度误差均是在相应输入下存在的位置上的误差。
3 动态误差系数
由误差表达式
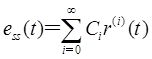 可得
可得
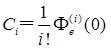 ,称为动态误差系数。它们与静态误差系数的关系为:
,称为动态误差系数。它们与静态误差系数的关系为:
0型系统:C 0 =1/(1+K p );
Ⅰ型系统:C 1 =1/K v ;
Ⅱ型系统:C 2 =1/K a 。
4 扰动作用下的稳态误差
如图3-1-2所示,对于存在扰动的控制系统,其输出端的扰动误差为:

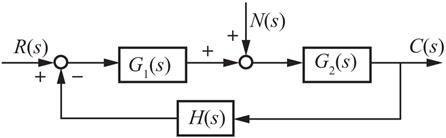
图3-1-2 存在扰动的控制系统
可以用以下两种方法分析其稳态误差:
(1)动态误差系数法,将误差的拉氏变换为Taylor级数来分析;
(2)当sE n (s)在s右半平面及虚轴上解析时,可以用终值定理来计算稳态误差,即
5 减小或消除稳态误差的措施
(1)由表3-1-4中的稳态误差表达式可知,由于系统开环增益处于分母位置,所以增大系统开环增益可减小稳态误差,同理增大扰动作用点之前系统的前向通道增益也可减小稳态误差;
(2)由表3-1-4可知,在相同输入信号作用下,系统型次越高,系统稳态误差可减小至0,因此在系统的前向通道或主反馈通道或在扰动作用点之前的前向通道或主反馈通道设置串联积分环节,可减小稳态误差;
(3)当系统存在多个扰动,可以采用串级控制抑制内回路扰动,主副控制器的总增益越大,则串级系统抑制副回路扰动的能力越强;
(4)采用复合控制,结合前馈控制和反馈控制,只要系统参数选择合适可有效减小甚至消除稳态误差,同时抑制扰动。