
下载掌阅APP,畅读海量书库
立即打开



电容式传感器事实上就是一个可变电容。若忽略电容器的边缘效应,则平行极板电容器的电容量为

式中 C ——电容量(F);
A ——极板的有效面积(m 2 );
ε 0 ——真空介电常数, ε 0 =8.85×10 -12 F/m;
ε r ——极板间介质的介电常数,当介质为空气时, ε r =1;
d ——两极板间的距离(m)。
由上式可知,改变电容器的 A 、 d 和 ε r 均可带来电容量 C 的变化,据此便可制作出三种不同类型的电容式传感器,即:变极板有效面积型、变极板间距型和变介电常数型,分别简称为 A 型电容式传感器、 d 型电容式传感器和 ε r 型电容式传感器。
图3-12是3种不同形式的 A 型电容式传感器,即平板平移式、圆柱平移式和旋转式电容传感器。
1.平板平移式电容传感器
当活动极板沿 x 方向移动Δ x 时(图3-12a),电容器极板有效面积的变化量为:

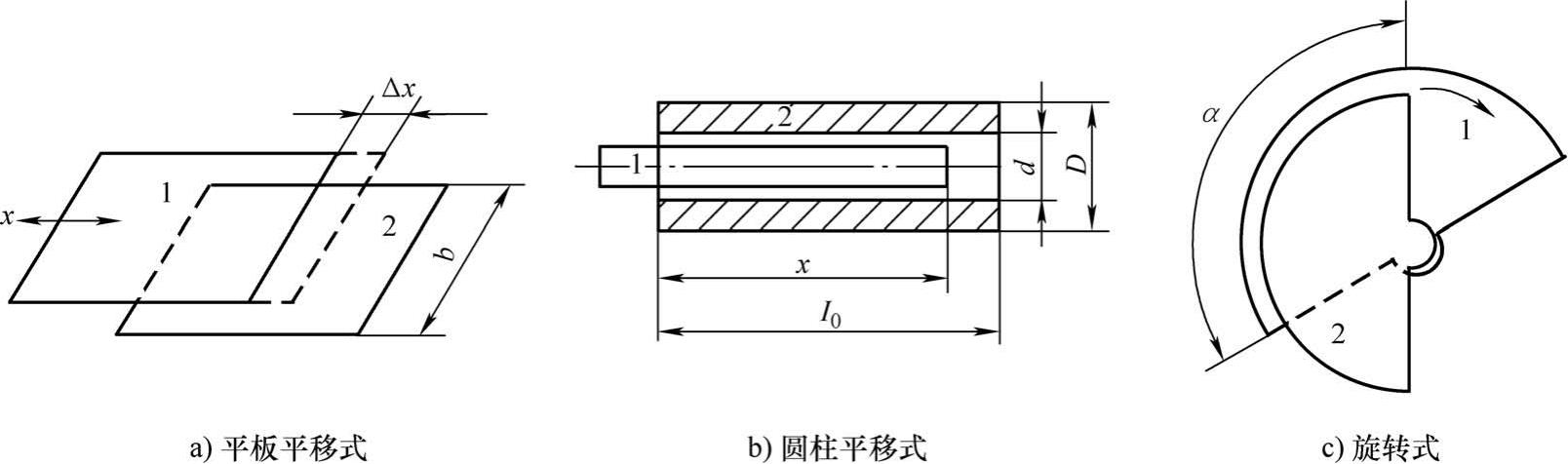
图3-12 A 型电容式传感器
1—活动极板 2—固定极板
由此带来电容量的变化为

式中
E
c
——传感器的灵敏度,
 。对于某一具体的电容式传感器,
d
、
ε
r
和
b
均为定值,即
E
c
为常数。由此可见,该电容式传感器的输出与输入呈线性关系。
。对于某一具体的电容式传感器,
d
、
ε
r
和
b
均为定值,即
E
c
为常数。由此可见,该电容式传感器的输出与输入呈线性关系。
2.圆柱平移式电容传感器
当沿电容器的轴线方向移动圆柱平移式电容传感器的活动极板时(图3-12b),利用高斯积分,可得到该电容器的电容量

式中 D ——固定极板的内径;
d ——活动极板的外径。
若活动极板的轴向移动量为Δ x ,电容的变化量

式中
E
c
——传感器的灵敏度,
 。
。
由于 ε 0 、 ε r 及 D 、 d 均为不变的量,因此,此种传感器也具有线性特性。
3.旋转式电容传感器
图10-12c给出的是一种旋转式电容传感器,当活动极板1旋转Δ α 角度时,电容量的变化量

式中
E
c
——传感器的灵敏度,
 ,该传感器具有线性特性。
,该传感器具有线性特性。
图3-13a是一平板电容器的示意图,若电容器极板间的电介质(即 ε r 不变)及电容极板的有效面积不变,则该电容器的电容量

由式(3-26)可知,当电容器极板间距 d 变化时,电容量随 d 的变化规律是一曲线,如图3-13b所示。
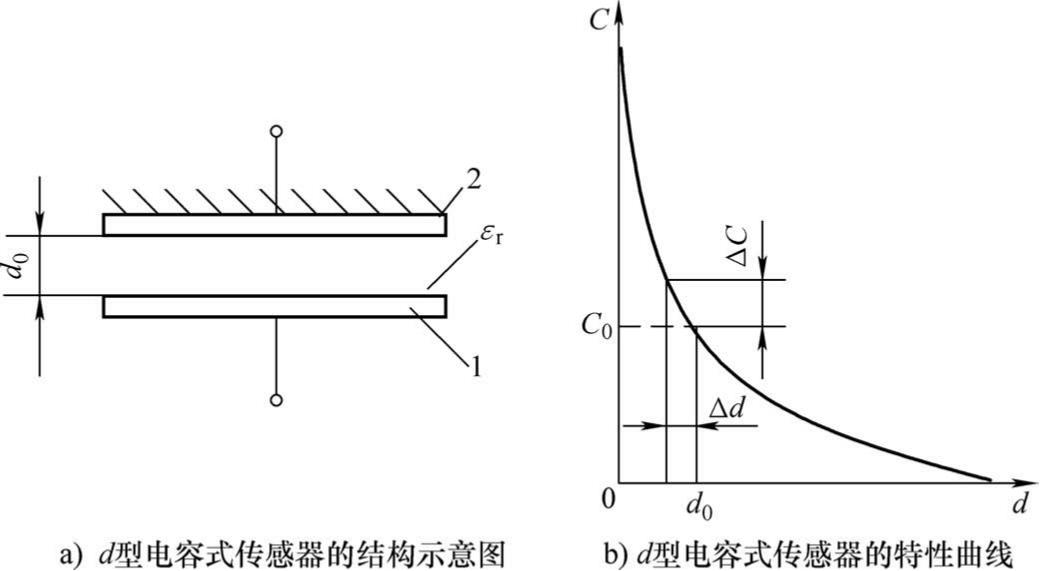
图3-13 d 型电容式传感器
1—活动极板 2—固定极板
设电容器初始状态两极板的间距为 d 0 ,对应的电容量
当活动极板1向固定极板2的方向平移Δ d 的距离时,该电容器的电容量将增加为Δ C ,即

将式(3-27)等式右边的分子和分母同乘以 d 0 +Δ d 得
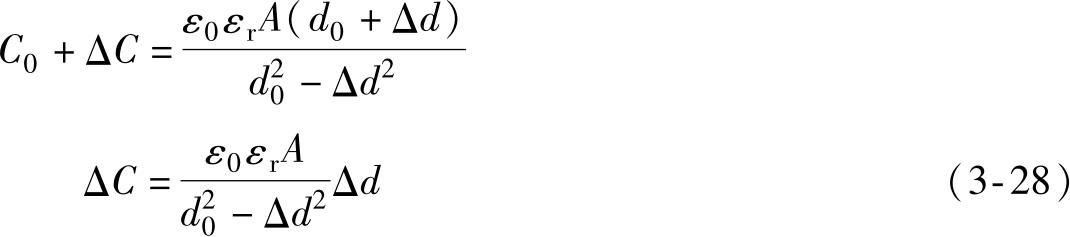
当Δ
d
很小时,
 ,则上式变为
,则上式变为

其灵敏度

式(3-30)表明,当Δ d 很小时, d 型电容式传感器的灵敏度与极板间距的二次方成反比,即极板间距越小,灵敏度越高。但当灵敏度提高时,非线性误差亦随之增大。此外,若增加 d 0 时,灵敏度 E c 迅速减小,这表明此传感器的测量范围非常有限。
图3-14是两种不同形式的 ε r 型电容式传感器,分别称为 ε r 型电容式液位传感器和 ε r 型电容式位移传感器。
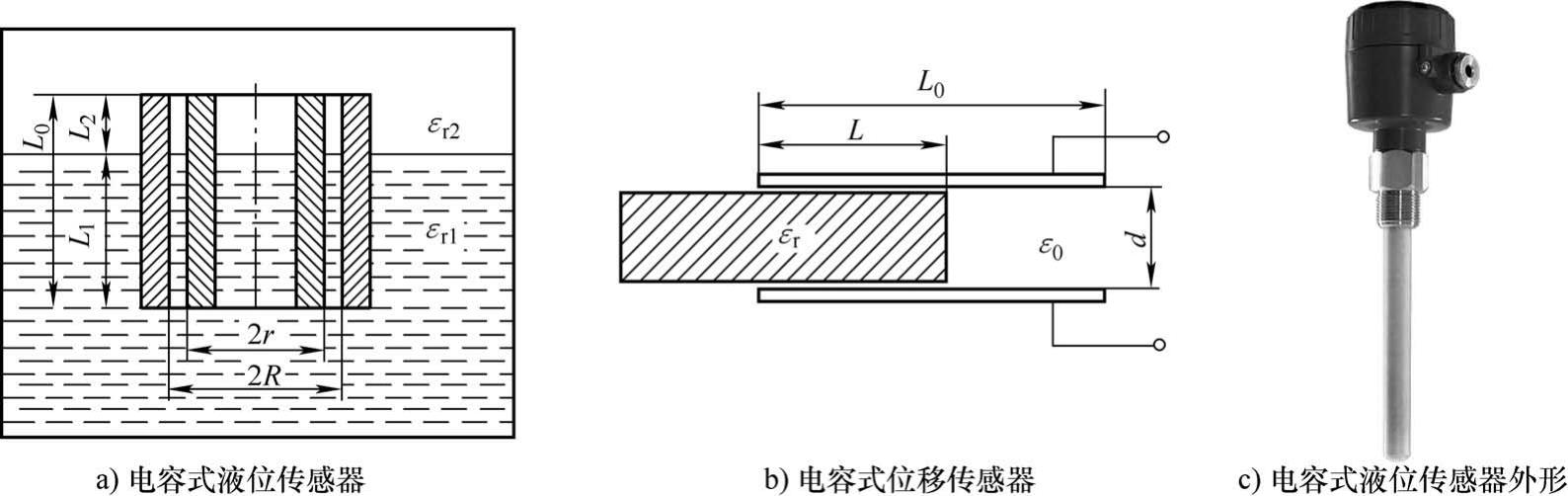
图3-14 ε r 型电容式传感器
1. ε r 型电容式液位传感器
设图3-14a中传感器两圆筒形极板的长度为 L 0 ,内极板的外径为2 r 、外极板的内径为2 R ,极板间的液体介质为非导电液体,其介电常数为 ε r ,极板间未被液体浸泡的部分是空气,其介电常数 ε r2 =1,极板被液体介质浸泡的深度为 L 1 ,此时该电容式传感器的输出电容

式中
C
1
——电容器两极板间为空气介质的电容量,
 ;
;
E
c
——电容式传感器的灵敏度,
 。
。
由式(3-31)可知,此电容式传感器的特性为线性。
2. ε r 型电容式位移传感器
由图3-14b可知,该电容式传感器的电容

式中 B ——电容器极板宽度;
L 0 ——电容器极板长度;
ε 0 ——真空介电常数;
ε r ——固体电介质的介电常数;
L ——固体电介质进入电容器极板的深度;
d ——极板间距;
C
1
——电容器极板间为空气介质的电容量,
 ;
;
E
c
——传感器的灵敏度,
 。
。
由式(3-32)可知,此电容式传感器的特性为线性。
所谓差动电容式传感器就是将两个结构形式和结构参数完全相同的电容式传感器用差动方式将其连接在一起,使之共同完成相关的测试。关于如何实现两个电容式传感器的差动连接,仅需要一个电桥就可以解决,具体方法见第四章中“测试信号的电桥补偿与修正”部分。
由第二章的分析可知,提高测试系统的灵敏度是提高系统测试精度的有效方法之一;此外任何电器元件,当通电时间延长时,必然会引起温升,电器元件的性能会发生变化,进而会产生测试误差。为了提高测试系统的灵敏度、消除温升所产生的误差,常将电容器做成差动式结构,如图3-15所示。差动结构的电容式传感器,其输出电容 C d 正好是相应的单个电容传感器输出电容的两倍,即传感器的灵敏度是相应单个电容传感器的两倍,而且还自动消除了温升所引起的测试误差。
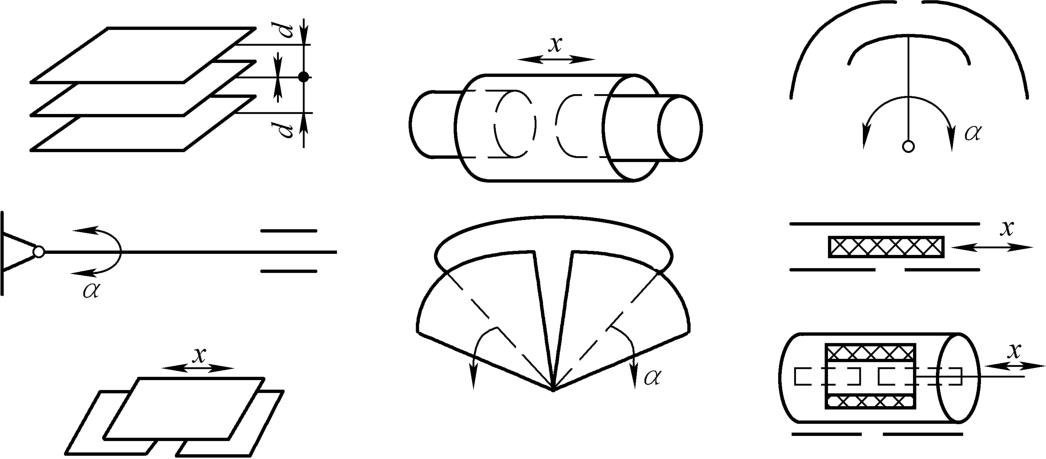
图3-15 差动机构的电容式传感器
由前面对 A 型、 d 型和 ε r 型三类电容式传感器的分析不难发现,电容式传感器的量程都非常有限,即只适合测量一些微小变化的量。然而在汽车试验及工程测试中经常会遇到变化范围很大的量。为了能有效解决变化范围较大的一些物理量的测量问题,近些年,在 A 型电容式传感器的基础上发展起来一种容栅式传感器,如图3-16所示。容栅式传感器的量程得到了极大的扩展。从理论上讲,它的测量范围可以为任意大小。
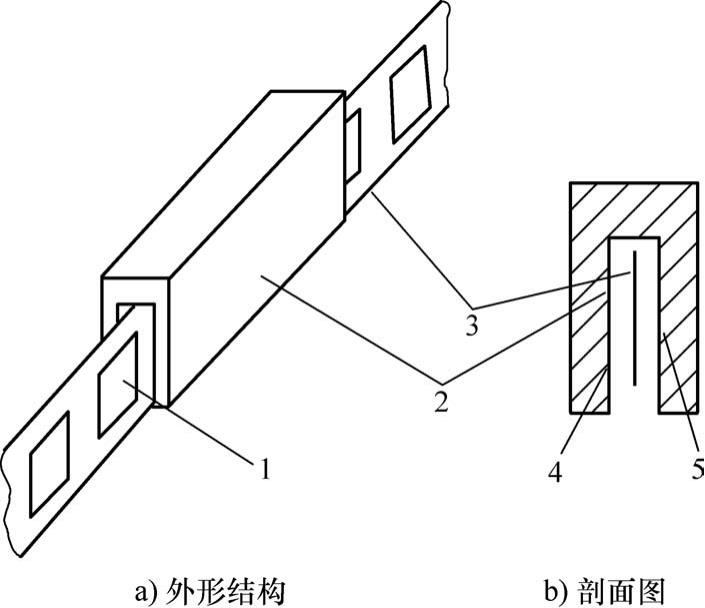
图3-16 容栅式传感器
1—矩形窗口 2—测量装置 3—金属带4—发射电极 5—接收电极
容栅式电容传感器仍然由两个平板电容极板组成,与前面所介绍的电容式传感器不同的是,传感器的一个极板变成了一个较长的栅片,当然,另一个极板既可以是单极板(图3-16),也可以是两块栅片(图3-17)。
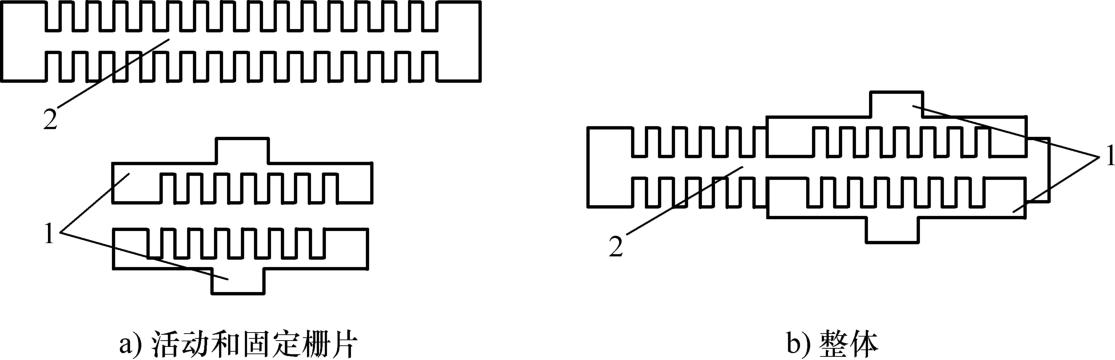
图3-17 活动极板与固定极板均为栅片的容栅式传感器
1—活动栅片式极板 2—固定栅片式极板
容栅式传感器已发展出多种不同的结构形式,由于它不仅量程大,而且精度很高(可达5μm),因此被认为是一种极有发展前途的传感器,在汽车试验领域已开始将其用于位置、位移和长度的测量。数显游标卡尺(图3-18)是容栅式传感器在工程测试领域的一个典型应用。
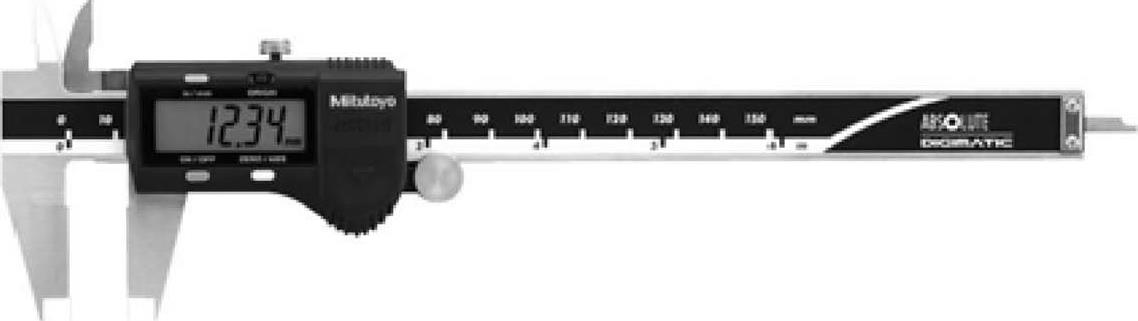
图3-18 数显游标卡尺
由于电容式传感器具有体积小、功耗低、精度高、性能稳定和所需驱动力小等特点,因此在汽车及各工程领域被广泛地用来测量位置、位移、压力、振动、噪声和倾角等。下面举两例介绍电容式传感器的应用。
1.电容式加速度传感器
图3-19是电容式加速度传感器的结构示意图。质量块4的上、下两个平面是经磨平抛光的两个活动电极,弹性支撑钢片3将其支撑在两固定电极5和1的中间,如此便构成了一个 d 型差动结构的电容式传感器。当该传感器受到振动加速度的作用时,质量块在惯性力的作用下上、下振动,两个差动联接的电容器 C 1 和 C 2 便向外输出与振动加速度相对应的电容量 C 。由于该传感器采用空气作为阻尼介质(气体黏度的温度系数比液体小得多),因此其测试精度较高。只要合理地设计弹性支撑钢片的刚度,便可获得高的通频带宽,因此它可以测量较高频率的振动加速度。
2.电容式倾角传感器
倾角测量一直是工程测试领域的一个难题,然而,近些年发展起来的电容式倾角传感器实现了用一种经济、简单的方法解决一个相对较难的倾角测量问题。图3-20是电容式倾角传感器的工作原理简图。电容器的上极板1是一金属平板,下极板3是一种球形极板 (球的一部分),两极板的连接处用绝缘材料隔开并将不导电的特制液体介质密封在两极板所围的空腔中,液体介质并不注满两极板所围的空腔。
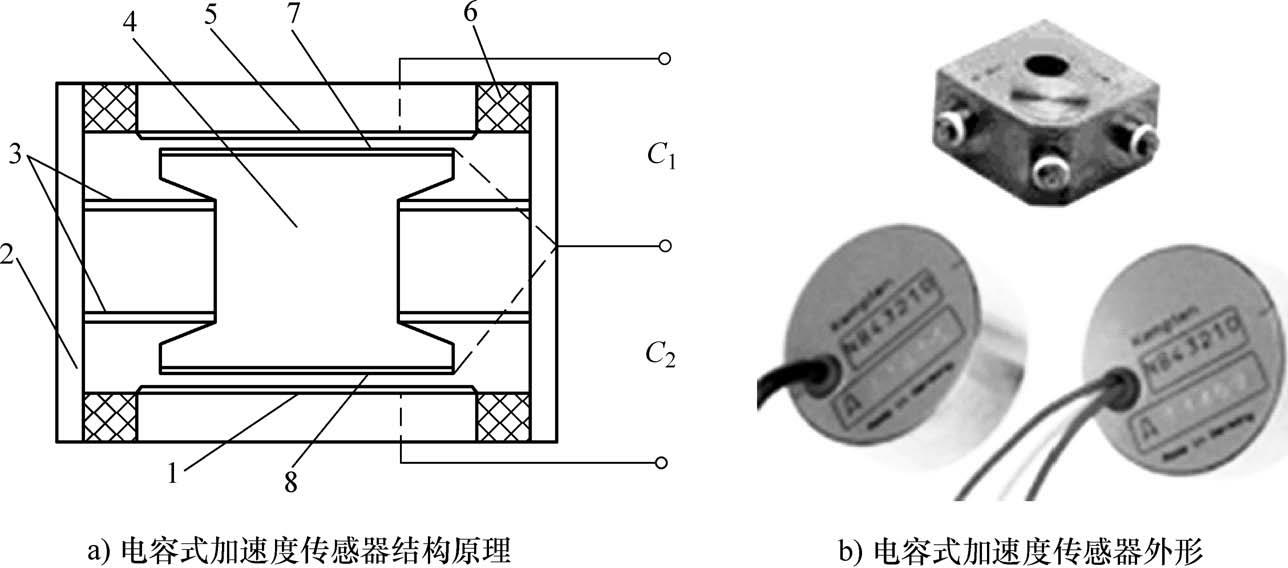
图3-19 电容式加速度传感器
1—下固定极板 2—外壳 3—弹性支撑钢片 4—质量块5—上固定极板 6—绝缘垫 7、8—上、下活动极板
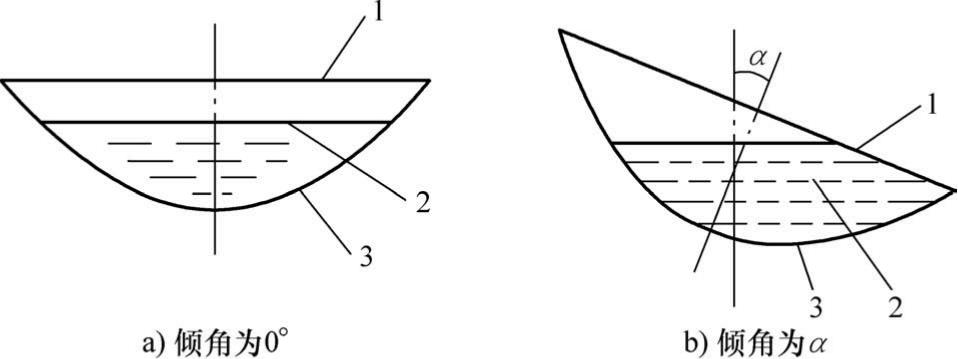
图3-20 电容式倾角传感器
1、3—电容器的两个极板 2—不导电的液体介质
图3-20a是倾角为0°的状态。此时,只有电容器下极板的部分面积被液体介质浸泡,而下极板上部的环形部分和上极板仍处在空气介质中。当传感器随被测试件倾斜任意角度时(图3-20b),电容器两极板被液体介质浸泡的面积随之改变,介电常数 ε r 随之发生变化,于是传感器的输出电容 C 随倾角 α 的变化而变化,如此便实现了倾角的测量。
图3-20所示的倾角传感器只能测量单一方向的倾角大小,对其略作改造,便可利用电容式倾角传感器测量绕 x 轴和 y 轴两个方向倾斜的倾角 α 和 β ,如图3-21所示。这种传感器称双轴式倾角传感器。
将图3-20所示的传感器按图3-21所示的方法将其分成4个参数完全相同的电容器1、2、3、4,并将电容器1和3、2和4分别连成2个差动式结构。显然,由电容器1和3组成的差动式 ε r 型电容传感器可测量绕 y 轴的倾角 α ,由2和4组成的差动式 ε r 型电容传感器可测量绕 x 轴的倾角 β 。这种传感器在各工程领域的应用十分广泛,如航空、航天器的飞行姿态控制、汽车四轮定位参数的测量、高层建筑及桥梁施工的倾斜量测量等。
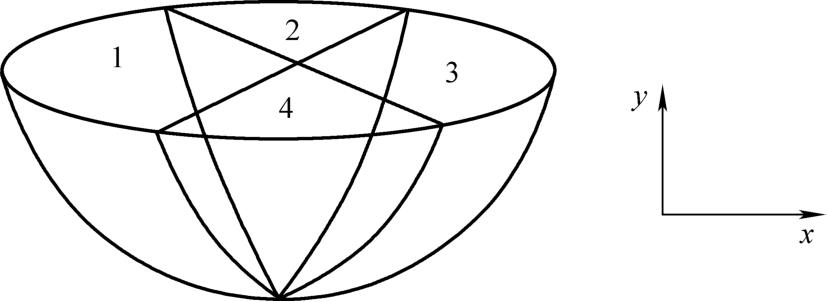
图3-21 双轴式倾角传感器