
下载掌阅APP,畅读海量书库
立即打开




目前,在浩瀚无际的地球外太空中运行着成千上万个各类人造航天器。这些“飘”在距离地球数百千米外的航天器就像人类放到太空中的“风筝”,井然有序、互不干扰。
风筝在空中悠然飞翔,离不开风筝线的牵引和控制。同理,如果没有航天测控通信技术的支持和保障,飞船的升空、运行和回收都将难以实现。航天测量船就是牵住风筝的那根线,通过这条看不见的“线”来控制这些航天器的“无形之手”就是航天测控。
航天测控的平台类型包括天上的测控卫星、陆地上的测控站,以及大海上移动的航天测量船。这些平台能使航天器按照人们的预先规划或实时发送的指令运行和工作,确保它不像一只断线的风筝失去控制。

图37 被线牵着的风筝
图38 航天器与地球之间看不见的“线”——航天测控
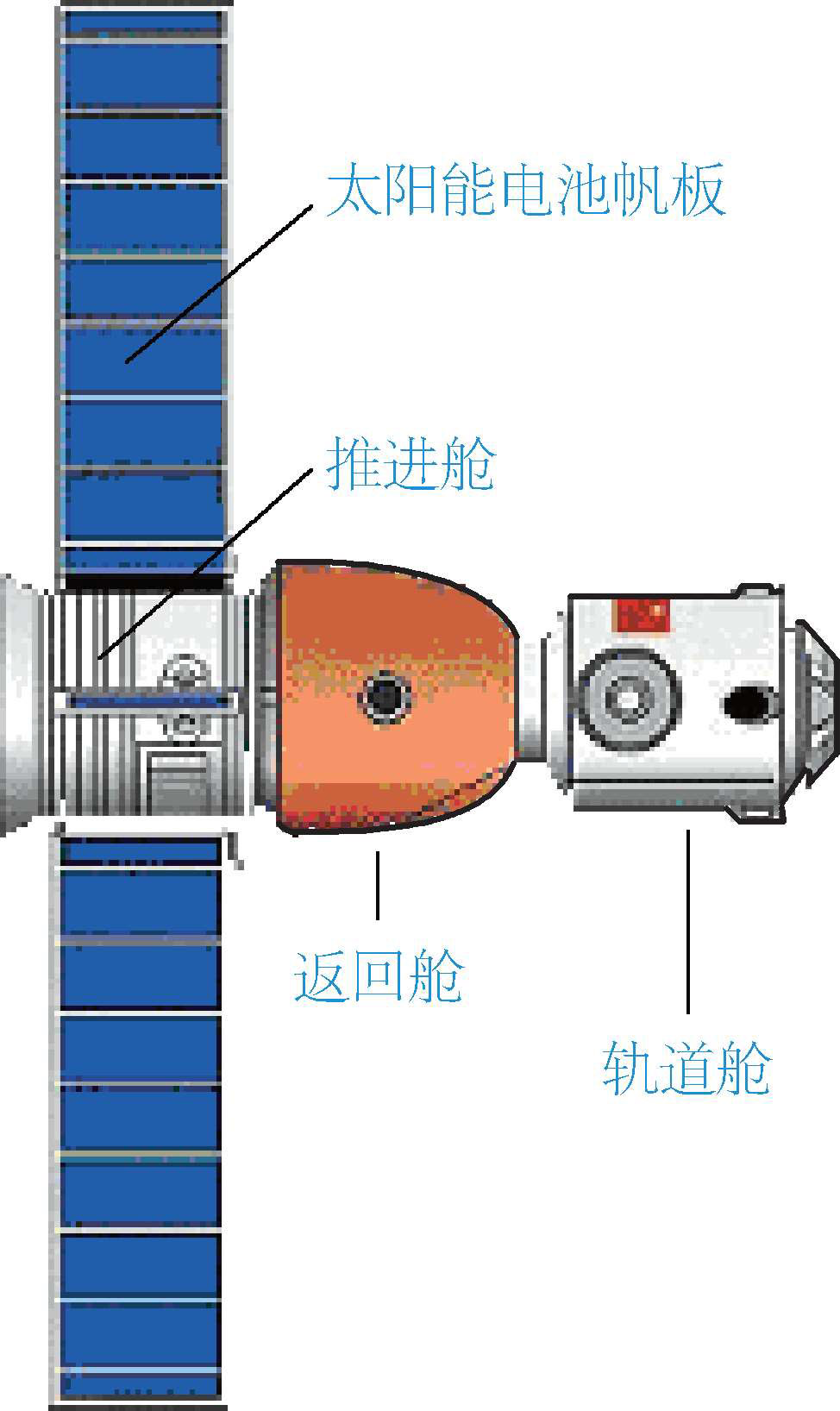
图39 载人飞船的典型组成
航天测量,也叫航天测控,是指对航天器飞行轨道、姿态和航天器上各分系统工作状态进行跟踪测量、监视与控制,目的是保障航天器按照预先设计好的状态飞行与工作,以完成规定的航天任务。
航天器,又称空间飞行器、太空飞行器,是指按照天体力学的规律,绕地球轨道或外层空间,按照受控飞行路线运行的飞行器,一般用于执行探索、开发、利用太空和天体等特定任务,包括火箭、人造卫星、宇宙飞船、航天飞机和各种空间站等。
航天器根据是否载人,可分为无人航天器与载人航天器。无人航天器根据是否环绕地球运行,分为人造地球卫星和空间探测器;载人航天器包括载人飞船、空间站和航天飞机。
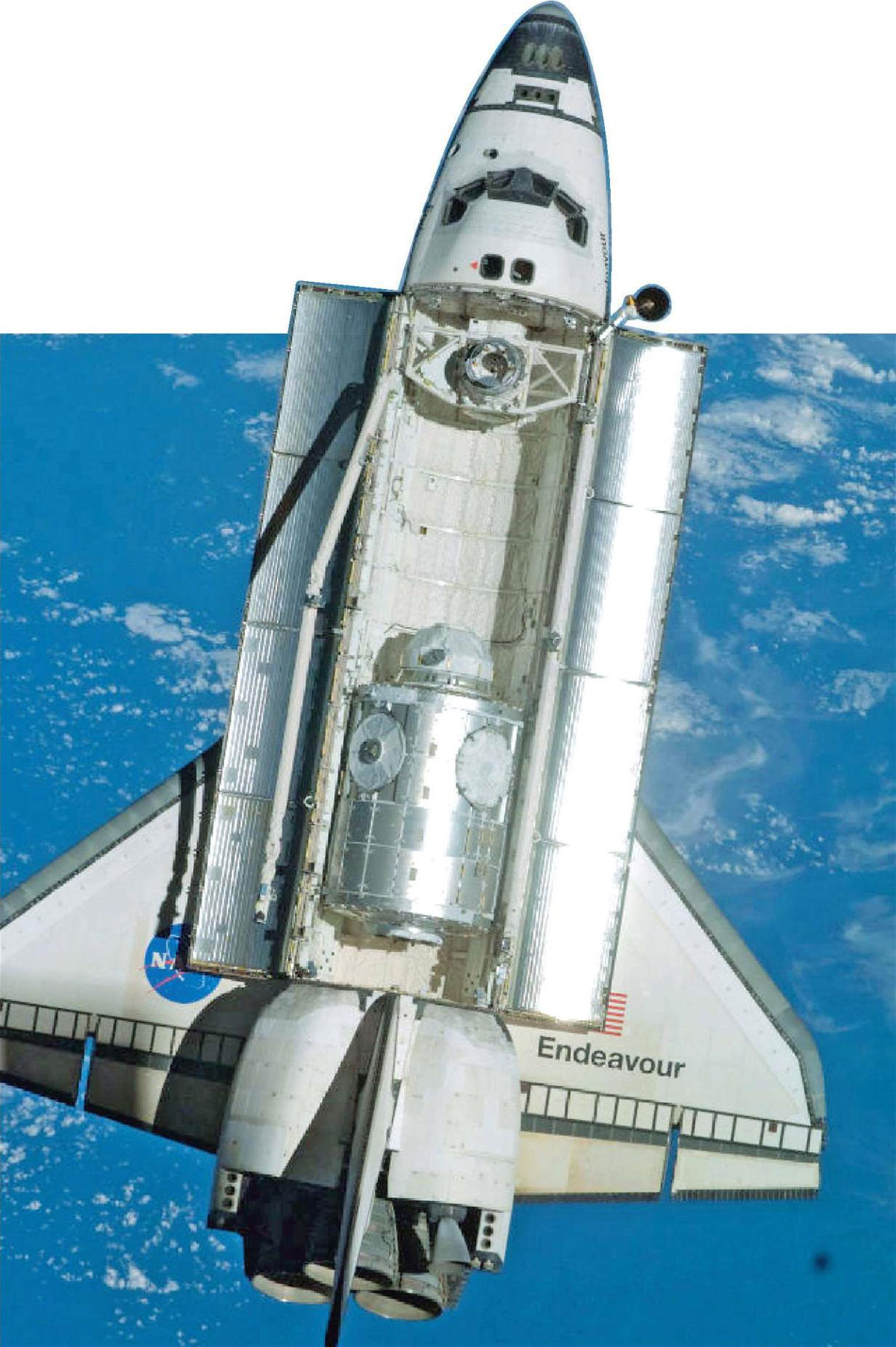
图40 美国“奋进”号航天飞机

图41 地球大气背景上的“奋进”号航天飞机
(图中橙色是对流层,白色是平流层,蓝色是中间层)
小贴士
航天飞机是现代火箭、飞机、飞船三者结合的产物,是一种可重复使用的往返于地球表面和近地轨道之间运输人员和货物的飞行器。它能像火箭一样垂直起飞,像飞船一样绕地球飞行,像飞机一样水平着陆。航天飞机是人类有史以来建造的最复杂的机器之一,强大的运载能力使其成为独一无二的航天器。它为人类自由进出太空提供了很好的工具,是航天史上的一个重要里程碑。

图42 航天器的种类
简而言之,航天测控就是保障地面与航天器的联系,就像手牵长线放飞风筝的人,控制着航天器的一举一动。因为航天飞行器发射升空之后,还要经过多次轨道调整才能顺利进入预定轨道,入轨后还需要进行太阳能帆板展开、姿态调整等一系列动作,在预定轨道正常飞行才算完成任务。
飞行器升空之后的这些动作大多需要地面对它发号施令,绝大多数航天器为无人航天器,航天器内各系统的工作要依靠地面遥控或自动控制。例如航天器发射升空后的各级火箭何时点火、卫星与运载火箭何时分离、卫星如何通过自身推进动力系统的控制实现不同轨道间的变轨、卫星上太阳能帆板的打开等,这些都离不开航天测控。

图43 牵住风筝的那根线
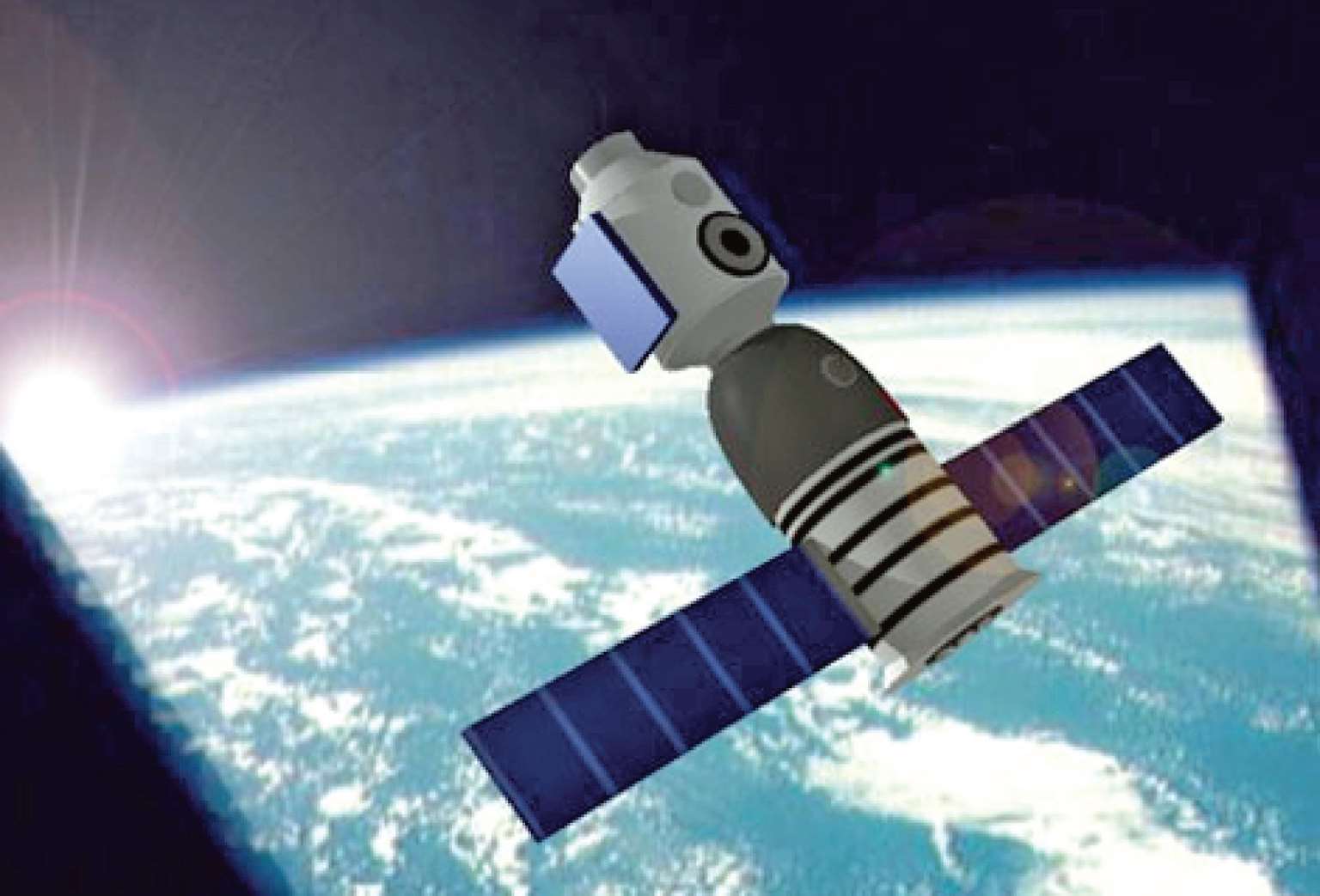
图44 航天器的能源提供者——太阳能帆板
太阳能帆板就像是飞船上的一个小型发电站,有供电和充电两大功能。通过将太阳能转换成电能,为飞船上的电器设备提供能源。飞船上虽然备有应急电源,但支持的时间有限,主要还是依靠太阳能帆板提供电能。
对于载人航天器,虽然航天员可以参与监视和控制航天器系统的运行和工作,但是航天器仍然要依赖地面指挥和控制。因此,航天测控是保障各类航天器正常工作必不可少的重要环节。
简而言之,航天测控系统是实现航天测量功能的整个系统。它是对航天器飞行轨道、姿态和其上各分系统工作状态进行跟踪测量、监视与控制,确保航天器按照预先设计好的状态飞行与工作,以完成规定的航天任务。当系统中具有天地话音、电视和用户数据传输等通信功能时,又被称为航天测控与通信系统。
航天测控系统的核心任务是测量和控制。系统在航天器飞行的各个阶段(发射、运行、回收)实现信息获取,即将航天器的飞行和工作数据发回地面,并用计算机进行计算、决策和实时反馈来控制航天器飞行的轨道和姿态。
小贴士
第一,飞行环境不同。所有航空器都是在稠密大气层中飞行的,其工作高度有限。航天器在近于真空的宇宙空间飞行,其运行轨道的近地点高度在100千米以上。
第二,动力装置不同。航空器应用吸气发动机提供推力,本身只携带燃烧剂(航空汽油和航空煤油)。航天器应用火箭发动机提供推力,既带燃烧剂(液体/固体/固—液型推进剂),又带氧化剂。
第三,飞行速度不同。现代飞机最快速度是3倍多音速,普通客机大多是以亚音速飞行。而航天器都是以非常快的速度在太空运行,如在距地面600千米高的圆形轨道上运行的航天器速度是22倍音速。
第四,工作时限不同。飞机最长飞行时间不超过一昼夜,相应的活动范围和工作时间都很有限。而航天器在轨道上可持续工作很长时间,如“和平”号空间站在太空飞行了整整15个年头。
第五,升降方式不同。一般飞机的升空是滑跑离开地面,加速爬升到安全高度的运动过程;返回地面降落时只要经过下滑和着陆即可。而航天器发射(陆地和海上发射)都是垂直升空的。
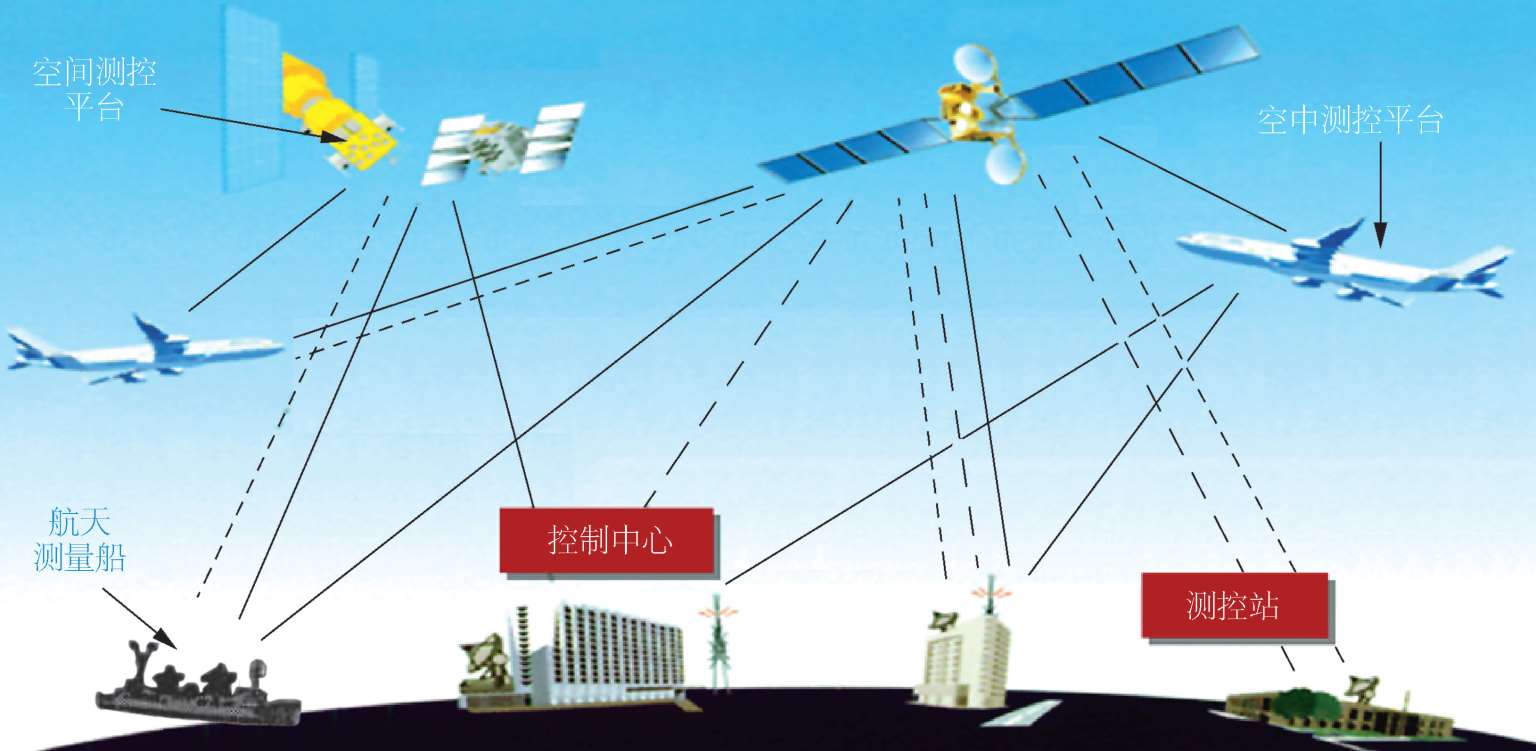
图45 航天测控系统组成
航天测控通信系统由控制中心、若干测控站(包括航天测量船),以及空中/空间测控平台(如测量飞机、跟踪与数据中继卫星等)组成。
按系统功能可分为跟踪测轨、遥测、遥控、天—地通信与数据传输、时间统一等分系统;按其测控的航天器类型大体可分为卫星测控系统、载人航天测控系统和深空测控系统三类。
航天测控系统的地面部分必须与装在航天器上的电子设备相配合,才能完成测控任务。对于测量,航天器上必须有相应的信标机或应答机,它们发回地面跟踪和测速用的射频信号,应答机同时发回测距信息。对于遥测,航天器上必须有检测各种参数的传感器和发送这些参数的射频发射机。对于遥控,航天器上必须有指令接收机。因此,航天器和地面/航天测量船上的两部分电子设备是一个不可分割的整体。

图46 北京航天指挥控制中心指挥大厅

图47 卫星通信手段实现通信连接
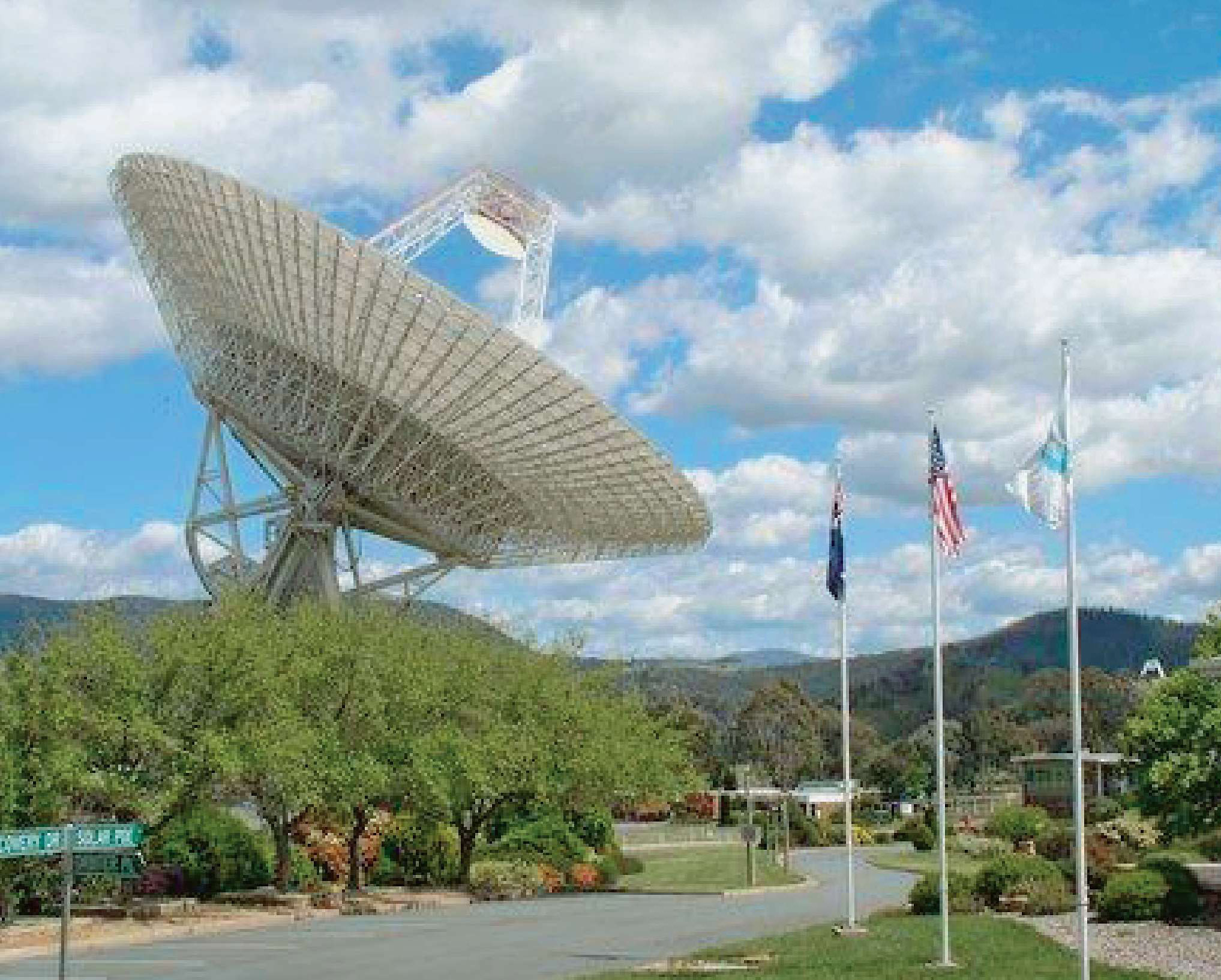
图48 美国某陆上固定测控站

图49 俄罗斯某陆上固定测控站
航天测控网依据其分布地点分地基测控网、天基测控网两种,航天测量船是地基测控网的一个节点。航天测控网通过对航天器跟踪测量、监视、控制和接收航天器发送出来的内部遥测数据,远程监测和遥控航天器的运动以及航天器上各种装置和系统的工作,接收来自航天器的各类信息,并可与载人航天器上的人员进行通信联络。
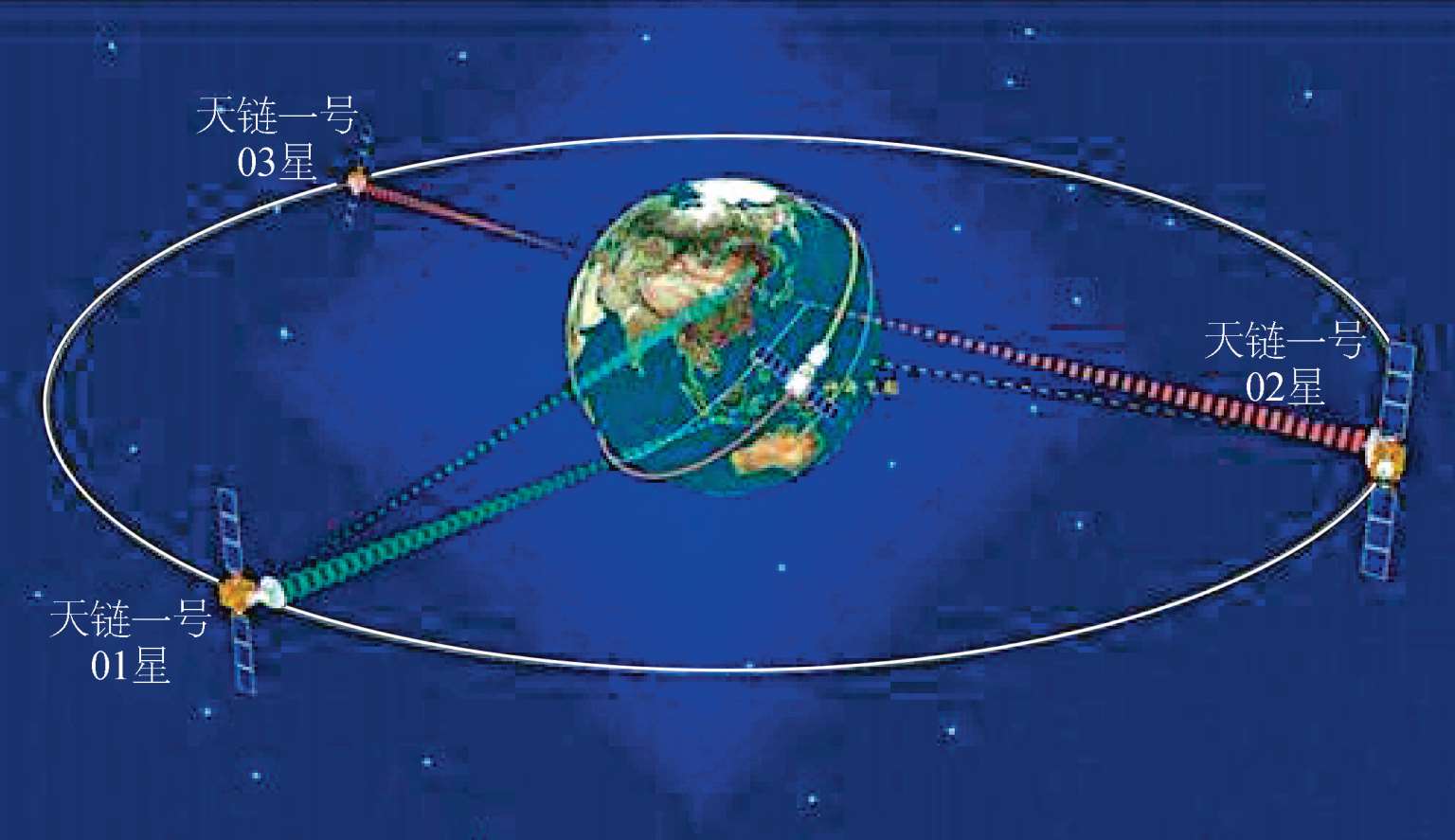
图50 数据中继卫星天链系统
地基测控网包括陆上固定测控站、陆上活动站、航天测量船,活动站和航天测量船可以根据不同的航天飞行任务分布在不同地域和海域,结束后返回大本营。与陆地测控站相比,航天测量船存在以下优势:一是自主性强,可以在任何时候在预定海域提供测控支持;二是灵活性好,可以根据需要在广阔的海洋上布设,以满足对不同射向、不同航天器的测控需要,并可调整船位,承担多个阶段、不同要求的特定测控任务。同时,航天测量船具备强大的测控功能,配置的无线电测控设备齐全,特别是配置了中心计算机系统,使其具备了强大的轨道和飞行器目标参数解算及应急测控处置能力。地基测控网中各测控站通过有线、无线和卫星通信手段实现通信连接。
美国、俄罗斯(苏联)、中国等国和欧洲空间局在航天飞行初期均使用地基测控网。
由于地面测控站(船)是设在地球上,所以在观测航天器时势必会受地平线和周围遮蔽物的影响,以至每个测控站(船)的测控覆盖率都较小,例如对于340千米高度、倾角43度的卫星,1个测控站(船)的测控总覆盖率仅约1.4%。
天基测控网是指由运行在高轨道、对其他低轨道航天器进行测控的卫星组成的测控网,以数据中继卫星和全球卫星定位系统为依托。美国、俄罗斯(苏联)、欧洲空间局从20世纪80年代初开始陆续研制并使用中继卫星系统。
天基测控网能实现对运载火箭及中、低轨道航天器的测控任务,覆盖率高,使用方便。
中继卫星一般运行在地球同步轨道,轨道高约36 000千米,相当于将一个地面测控站搬到了天上,让它居高临下地跟踪、测量、监视和控制运行在眼皮底下的航天器,因此测控范围很广,一颗卫星的波束可以覆盖半个地球,测控覆盖率高达50%左右。
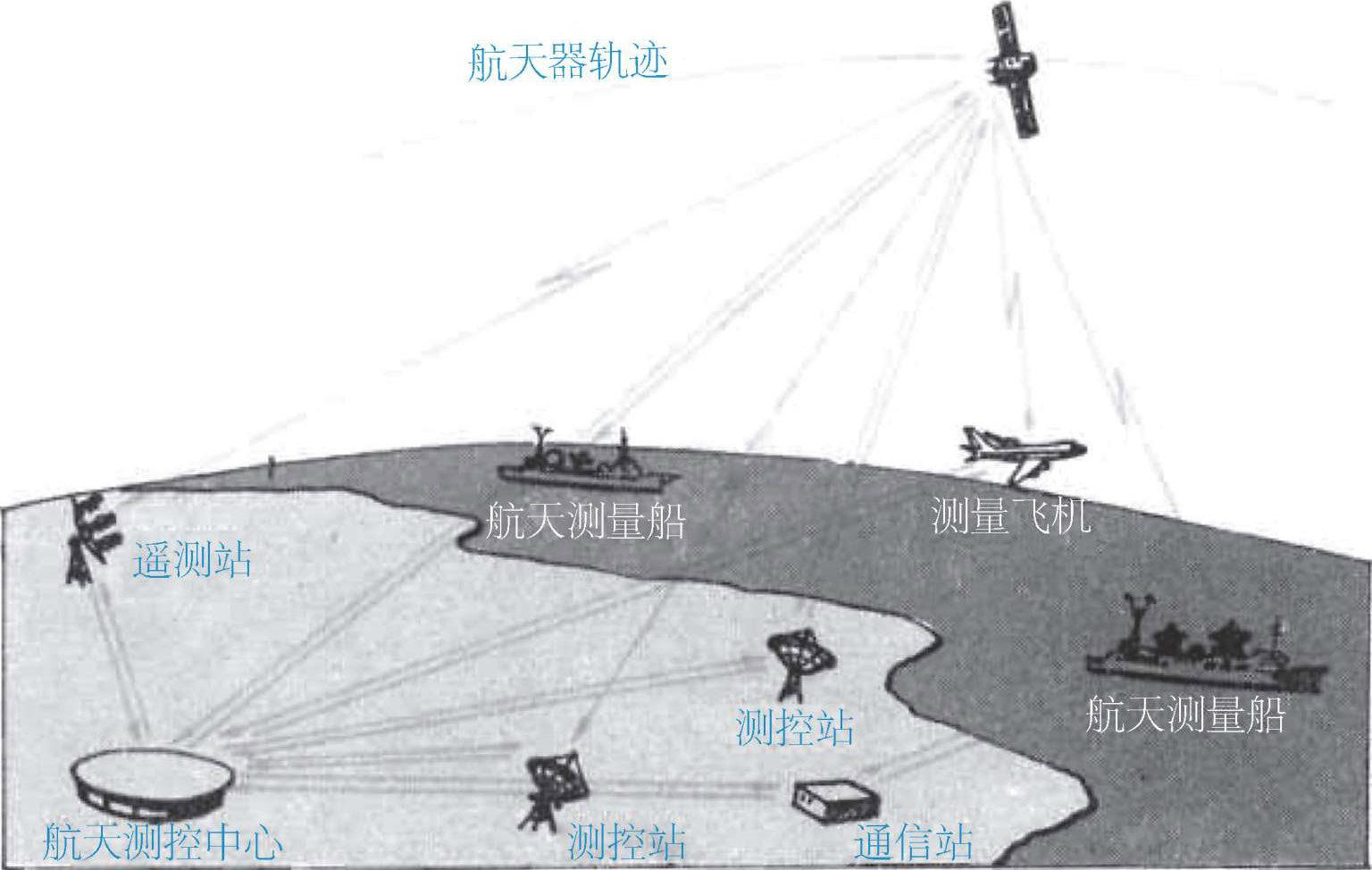
图51 我国的航天测控网示意图
中国从1967年开始建设自己的航天测控网,最早的卫星测控网于1970年4月建成,成功完成了我国第1颗人造地球卫星(“东方红1”号)的跟踪测轨任务。
1975年又形成了超短波近地轨道卫星测控网。同年11月,圆满完成了我国第一颗返回式遥感卫星的测控任务,使我国成为第三个能控制卫星返回的国家。
图52 西安卫星测控中心
1979年底,我国建成了两艘具有国际先进水平的测量船,成为继美国、苏联、法国之后第四个拥有航天测量船的国家。
小贴士
由于嫦娥四号探测器登陆月球的位置始终背对地球,使它与地球上的测控中心不仅相隔遥远且中间隔着月球球体,通信信号无法穿透月球,“鹊桥”因此诞生,承担起了地月联通的“天桥”,实现了地球与月球背面的嫦娥四号探测器之间的中继测控通信。
1983年底,我国建成了地球同步通信卫星测控系统,于1984年1月投入使用,至此我国地球同步卫星测控网初步建成。
1987年底,西安卫星测控中心建成,大大增加了卫星控制管理的能力。
为了减少航天器上电子设备的重量、体积,特别是要减少天线的数目,将各种测控功能适当地综合在一个统一的射频载波上是一个重要的发展。这种系统称为微波统一测控系统。
1992年,我国成功研制出符合国际标准的C频段统一测控系统,可进行单站或多站测量,提高了发射国外卫星的测控能力。

图53 青岛航天测控站
1996年3月北京航天指挥控制中心建成。4块巨幅大屏幕和几十台显示终端,显示着不断变化、标示着任务状况的数据、曲线和图像。大屏幕上方标示着北京时间、联调时间、飞行时间的LED显示屏,同时不断跳跃着各种飞行控制的数据。
航天指挥控制中心可与太空中飞行的“神舟”号飞船建立起连接,实现天—地对话;还可以将遍布全球的地面测控站及分布在三大洋上的“远望”号航天测量船连成一体,牢牢牵住翱翔在茫茫太空的飞船。它是我国载人航天工程和绕月探测工程试验任务的指挥调度、飞行控制、分析计算和数据处理中心,是卫星发射试验北京任务指挥所的技术支持单位,也是我国对外测控服务的一个窗口。拥有指挥通信信息处理、监控显示、飞行控制等于一体的综合性强、反应快捷、运算精确的现代化控制系统,是对飞船在太空飞行进行指挥控制的“中枢神经”。

图54 我国的国外测控站之一“内乌肯深空站”

图55 天舟一号发射时的北京航天指挥控制中心

图56 三亚测控站
1999年,我国研制成功S频段统一测控系统,建成了由5个陆地测控站、4艘测量船、3个活动站、3个国外站、2个着陆场和北京航天指挥控制中心、东风指挥中心、西安卫星测控中心等组成的有史以来覆盖最广泛的载人航天测控网,并于1999年11月20日首次服务于我国第一艘无人飞船的飞行控制任务。
随着载人航天工程的启动,航天测控网又进入了一个新的发展阶段,扩充改造了设备,更新了软件,在国外设立了卡拉奇站(巴基斯坦)、纳米比亚站、马林迪站(肯尼亚)、内乌肯站(阿根廷)等,使整个测控网的测控能力有了新的质的飞跃。
小贴士
航天指挥控制中心是航天器飞行的指挥控制机构。其主要任务是:实时指挥和控制分布在全球各地的航天测控站收集、处理和发送各种测量数据,监视航天器的轨道、姿态以及设备的工作状态,实时向它们发送控制指令,确定航天器的飞行轨道参数,发布其轨道预报等。
2003年10月成功完成了我国首次载人航天飞行的测控任务,使我国成为继俄罗斯(苏联)、美国之后第三个独立进行载人航天的国家。
2005年10月在神舟六号飞船上成功使用了船载海事终端进行全球测控试验。
2008年位于海南三亚的航天测控站建成并投入使用。三亚测控站是我国目前位置最靠南端的陆基航天测控站,高耸壮观的白色标校塔、巨大无比的白色球状天线罩是三亚测控站的重要标志。
喀什、佳木斯和三亚分别位于我国西北部、东北部和南部,三个陆地测控站构成我国陆基测控网的重要骨干支点,充分利用了我国国土资源经纬度分布宽广的地理优势,构成了我国陆基测控网“大三角”布局,为满足未来我国航天事业的高速发展提供了有力保障。
目前我国具有符合国际标准的C、S频段统一测控系统,具备了国际联网、进行国际测控合作的能力。
运载火箭、卫星、载人飞船等航天器能够成功发射并进入预定轨道,离不开地面测控站对其发出的一道又一道指令。因此,我国在境内建立了大量的测控站,形成地面航天测控网络,对航天器进行指挥控制。说到这,细心的读者可能会想,航天器是环绕地球飞行的,当航天器飞出国境,进入茫茫大海上空以后,尤其是运行到地球的另外一面时,该如何对其进行测控呢?
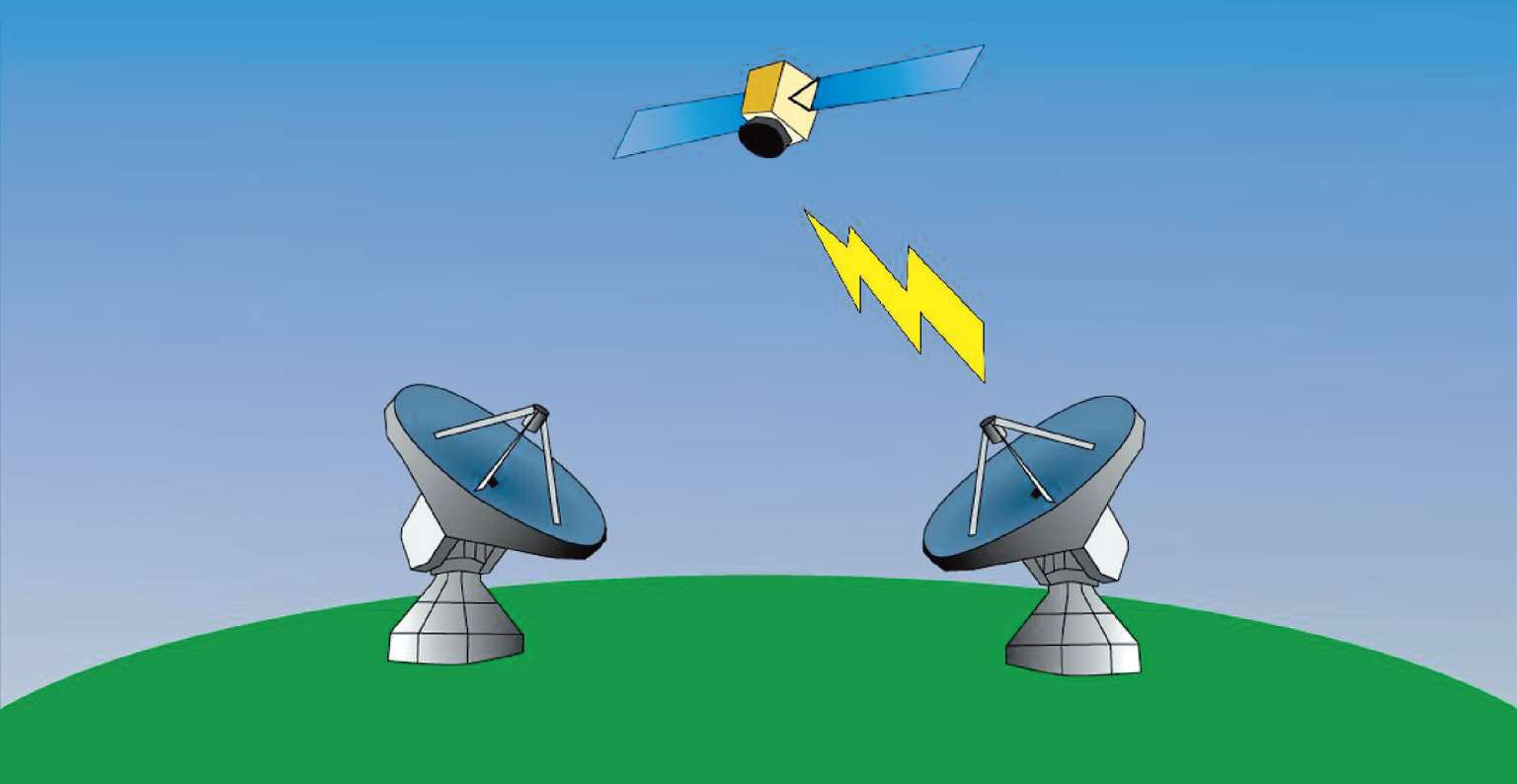
图57 不同地点的地面测控站
这时就需要航天测量船发挥作用了。航天测量船犹如在大海上“放风筝的人”,天上的“风筝”尽在掌握,它是陆基测控网络的有效补充。
当陆地上的测控站不能实现对运载火箭、卫星、载人飞船等航天器的全程跟踪测控时,就需要通过在海洋上设立可移动的测控点,来保证航天器的关键弧段和较高的测控覆盖率。而这些海洋上的测控点就是航天测量船,这些测量船在卫星发射、载人航天、探月等航天工程中发挥了巨大的作用,成为航天测控网的重要组成部分。
航天测量船的作用主要包括以下几类:运载火箭入轨段测量、卫星测控、飞船测控通信。
航天测量船的测控范围与陆地测控区域互补,联合完成对各类航天器飞行轨道范围的全覆盖。航天测量船可以根据航天器及运载火箭的运行轨道和测量控制需求配置在适当海域,在航天指挥控制中心的统一指挥下跟踪测量航天器的运行轨迹,接收遥测信息,发送遥控指令,与航天员通信以及营救返回溅落在海上的航天器返回舱等;还可用来跟踪测量试验弹道导弹的飞行轨迹,接收弹头遥测信息,测量弹头海上落点坐标,打捞数据舱等。
因此,航天测量船具有以下几方面的独特优势。
机动性高。在一次任务中可以调整船位,承担多个不同的测控任务,例如在完成入轨段测控后还可以提供变轨等其他重要弧段的测控。
灵活性好。一次出航可以在不同海域完成多个不同的任务,也可以在飞行任务前的一定时间内调整船位布点,完成其他应急任务。
受位置限制少。测量船不受陆地限制,可根据需要布设在陆上测控站无法覆盖到海域,对航天器关键飞行弧段提供测控支持。
覆盖效率高。测量船可以依次布设在高纬度海域,因而对航天器特别是载人航天器测控的覆盖效率高。
小贴士
由于地球是一个球体,而无线电信号又是直线传播的,以无线电波传播为基础的测控系统,用一个地点的测控站不可能实现对运载火箭等航天器进行全航程观测,尤其是对于较低轨道的卫星或其他航天器来说,需要用分布在不同地点的多个测控站接力连接才能完成测控任务,形成航天测控网。
因此,很多国家虽然在自己国土上建了许多测控站,但往往都满足不了大型航天任务跟踪测量的需要,还需要在大陆延伸之外的海洋上建立活动的测控站,或在空中建立卫星观测与数据中继传输系统。