
下载掌阅APP,畅读海量书库
立即打开




机器人的感知系统一般由传感器和与之相对应的数据处理卡组成。或许有人会问,既然已经有了驱动,为什么还需要传感器来进行检测呢?
我们知道,人类在运动时,需要时刻把握外界信息,并及时对这些信息进行反馈,运动动作才不会出错。同理,机器人在运动时,也需要对外界的信息进行适当的反馈,才能确保运动是“正确的”。因为即便理论计算出的运动过程是可行的,但在实际机器人运动过程中,由于外界干扰等因素的影响,机器人的运动状态有可能会与计算规划的结果不一样。这就需要利用适当的传感器信息作为反馈控制以保证运动的有效性。也正是因为有了如同人类一样的“感知系统”,机器人才具备了类似人类的知觉功能和反应能力。
人类在获取外界信息时,一般是通过眼睛、耳朵、鼻子、舌头、皮肤等部分从外界接受信息,可从外界获得视觉、听觉、嗅觉、味觉、触觉等信息。而机器人运动同样也需要获得其中的信息或者一部分信息,才能做出运动的决策和判断。机器人的这些“感觉”都是通过传感器得以实现的。例如,在机器人的装配作业中,一般有决定零件安装位置的距离传感器、检测零件形状的视觉或触觉传感器以及能检测手的把握状态及安装状态的滑觉传感器和力觉传感器。机器人能够根据从这些传感器获取的信息做出判断、控制并进行有效工作。
感知系统由内部传感器和外部传感器组成,其作用是获取机器人内部和外部环境的信息,并把这些信息反馈给控制系统。内部传感器用于检测各个关节的位置、速度等变量信息,为伺服控制系统提供反馈信息。外部传感器用于检测机器人与周围环境之间的一些状态变量,如距离、接近程度和接近情况等,用于引导机器人,便于其识别物体并进行相应的处理。外部传感器一方面使机器人更准确地获取周围环境情况,另一方面也能起到误差校正作用。
机器人通过传感器反馈的信息,可以实现和人类类似的感知过程和感知结果。机器人的“感知”过程如图3-37所示。

图3-37 机器人“感知”过程
从前面的介绍中可以看出,传感器对机器人的重要性不言而喻。因此,传感器技术已经成为当前机器人研究中重要课题之一。机器人未来能够发展到怎样的一种程度,传感器的发展将是关键的技术之一。
通过前面的介绍可知,传感器的性能好坏在机器人中起着相当关键的作用。那么,机器人传感器的性能到底通过哪些指标来评价呢?
传感器的性能分为静态特性和动态特性,因此传感器的性能指标也分为静态性能指标和动态性能指标。
传感器的静态特征是传感器本身的特性,是传感器的输出量与输入量之间所具有相互关系。因为这时输入量和输出量都和时间无关,所以它们之间的关系,即传感器的静态特性可用一个不含时间变量的代数方程,或以输入量作横坐标,把与其对应的输出量作纵坐标而画出的特性曲线来描述。传感器的静态性能指标主要有灵敏度、精度、线性度、分辨率、迟滞、重复性、漂移、阈值等。
① 灵敏度 这是传感器静态特性的一个重要指标。传感器的输出信号达到稳定时,如果稍微改变输入信号,那么输出信号的变化量与输入信号的变化量的比值,就是灵敏度。
一般来说,传感器的灵敏度越高越好,但是过高的灵敏度有时会导致传感器输出稳定性下降。
需要注意的是,传感器的灵敏度是有方向性的。当被测量是单向量,而且对其方向性要求较高,则应选择其他方向灵敏度低的传感器;如果被测量是多维向量,则要求传感器的交叉灵敏度越低越好。
② 精度和线性度 传感器的精度是指传感器的测量输出值与实际被测量值之间的误差。线性度是指传感器输出信号与输入信号之间的线性程度。
传感器的线性范围是指输出与输入成正比的范围。以理论上讲,在此范围内,灵敏度保持定值。传感器的线性范围越宽,则其量程越大,并且能保证一定的测量精度。因此,传感器的精度和线性度越高越好。
③ 分辨率 如果输入量从某一非零值缓慢地变化,当输入变化值未超过某一数值时,传感器的输出不会发生变化,即传感器对此输入量的变化是分辨不出来的。只有当输入量的变化超过分辨率时,其输出才会发生变化。分辨率刻画传感器可感受到的被测量的最小变化量。
通常传感器在满量程范围内各点的分辨率并不相同,因此常用满量程中能使输出量产生阶跃变化的输入量中的最大变化值作为衡量分辨率的指标。上述指标若用满量程的百分比表示,则称为分辨率。
分辨率是指传感器在整个测量范围内所能辨别的被测量的最小变化量,或者所能辨别的不同被测量的个数。如果它辨别的被测量最小变化量越小,或被测量个数越多,则分辨率越高;反之,分辨率越低。传感器的分辨率直接影响机器人的可控程度和控制品质。因此,传感器的分辨率也是越高越好。
④ 迟滞 传感器在输入量由小到大(正行程)及输入量由大到小(反行程)变化期间其输入输出特性曲线不重合的现象成为迟滞。对于同一大小的输入信号,传感器的正、反行程输出信号大小不相等,这个差值称为迟滞差值。
⑤ 重复性 当输入信号按同一方向连续变化多次时,传感器的检测结果有可能不一样。这个检测结果变化不一致的程度称为传感器的重复性。结果的变化越小,重复性越好,传感器也就越好。对于多数传感器来说,重复性指标都优于精度指标。
⑥ 漂移 传感器的漂移是指在输入量不变的情况下,传感器输出量随着时间变化,此现象称为漂移。传感器的漂移对传感器的检测结果是有害的,因此传感器的漂移越小越好。
⑦ 阈值 当传感器的输入从零值开始缓慢增加时,在达到某一值后输出发生可观测的变化,这个输入值称为传感器的阈值电压。
传感器的动态特性是指传感器在输入变化时,它的输出特性。在实际工作中,传感器的动态特性常用它对某些标准输入信号的响应来表示(最常用的标准输入信号有阶跃信号和正弦信号两种,这两种信号分别如图3-38和图3-39所示),传感器的动态特性常用阶跃响应和频率响应来表示。传感器的动态性能指标就是响应时间。
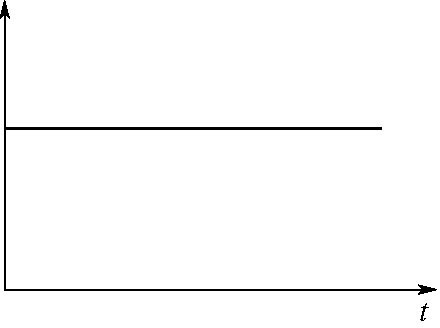
图3-38 阶跃信号
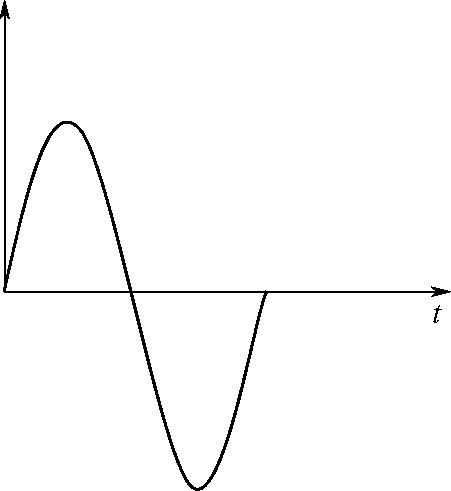
图3-39 正弦信号
响应时间就是传感器输出信号变化到一个稳定值需要一定的时间。响应时间是传感器的动态特性指标,有时也用频率响应特性来代替。
传感器的分类有很多,机器人传感器主要包括机器人视觉、力觉、触觉、距离觉、姿态觉、位置觉等传感器。与工业检测中大量使用的普通传感器相比,机器人传感器对传感信息的种类和智能化处理的要求程度更高。
机器人传感器根据检测对象不同可分为内部传感器和外部传感器。内部传感器主要用来检测机器人自身的运动状态等相关信息,如运动时手或者腿转动的角度等。外部传感器用来检测机器人诸如位置、距离、温度、工作状况等信息。内部传感器和外部传感器的主要检测内容及种类如图3-40和图3-41所示。
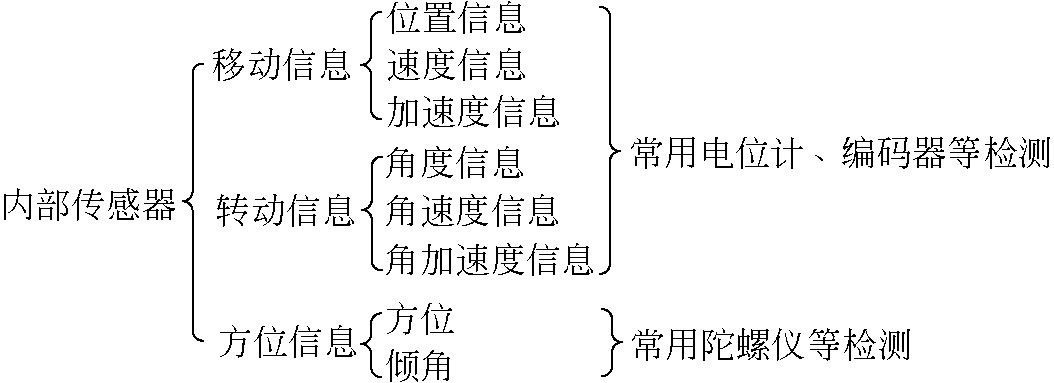
图3-40 内部传感器检测内容及常用检测装置
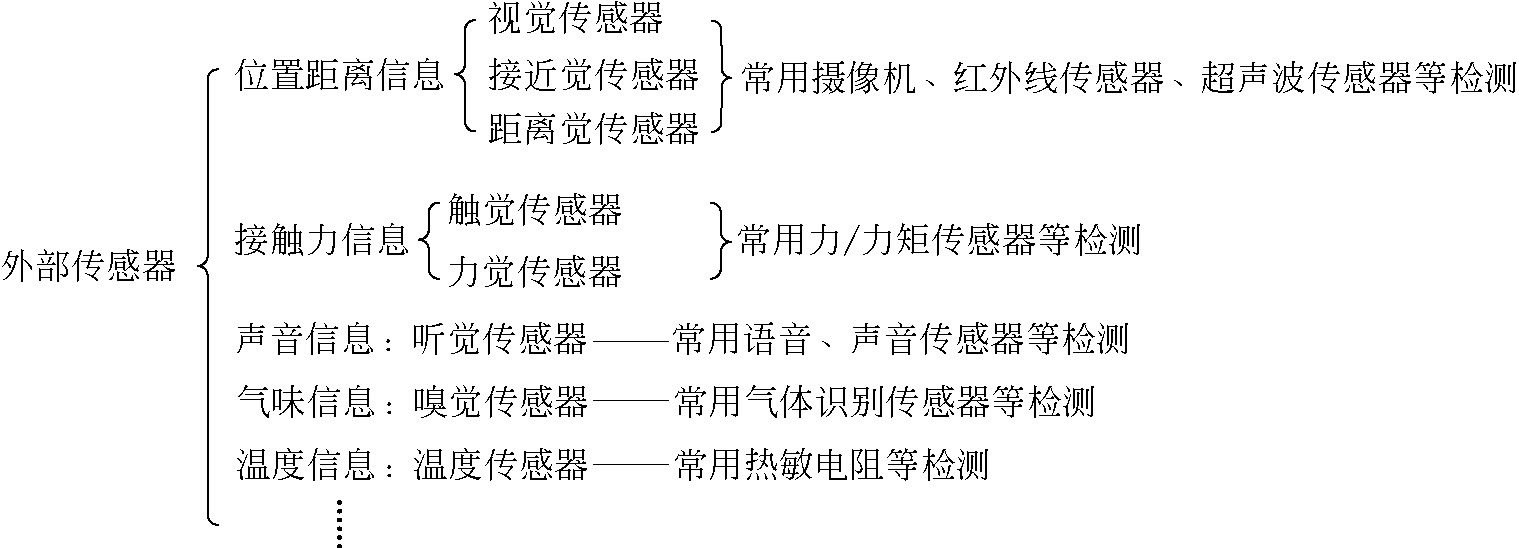
图3-41 外部传感器检测内容及常用检测装置
对于机器人的角度、角速度、角加速度等内部位置信息和运动信息的检测,通常使用电位计和编码器。尤其是编码器,在很多场合它已经与伺服电机配置在一起出售。根据检测原理,编码器可以分为光学式、磁式、感应式和电容式。常见光电编码器如图3-42所示。
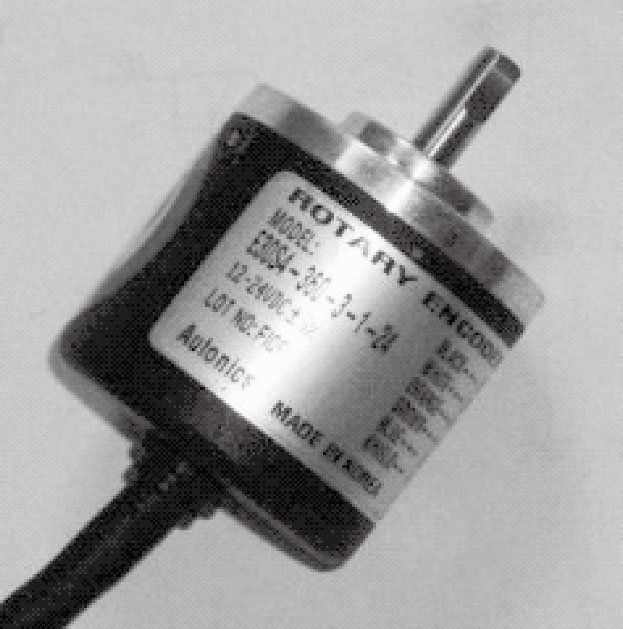
图3-42 常见光电编码器
编码器的读数精度对机器人的实际控制精度有着直接影响,现对编码器的工作原理进行简要介绍,其工作原理如图3-43所示。光电式脉冲增量编码器一般由码盘、发光元件、光敏元件和信号处理电路四个部分组成。码盘安装在被测元件上,与被测元件固定。工作时,发光元件发出光信号照射在码盘上,在通过码盘的刻度时,光信号能透过码盘被光敏元件接收,从而光敏元件接收到的光信号就是被测元件的转角信息。光敏元件再把光信号转换成电信号送给识别电路,从而得到码盘的转角。再根据相邻两个电信号的时间间隔及先后顺序,即可求出码盘的转速与旋转方向。
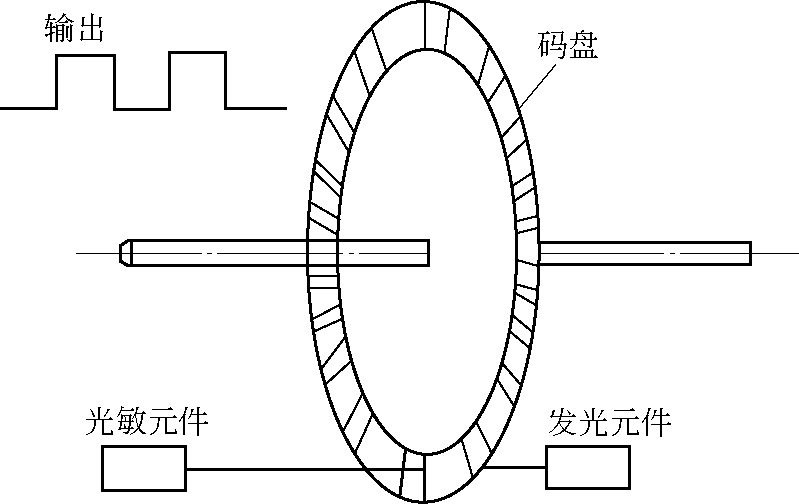
图3-43 光电编码器工作原理
编码器的检测精度与码盘刻度的多少有直接关联,刻度数量越多,识别的能力越强,编码器的精度也就越高,分辨率越强。对应的参数有每转刻线数(Line)、每转脉冲数(PPR)、最小步距(Step)、位(Bit)等。实际转角与刻线数关系见式(3-2)。

式中 n ——每转刻线数;
θ ——实际角度。
编码器的精度,是指编码器输出的信号数据对测量的真实角度的准确度,对应的参数是角分(′)、角秒(″)。
由于光电编码器输出的检测信号是数字信号,因此可以直接进入计算机进行处理,不需放大和转换等过程,使用非常方便,应用越来越广泛。
对于线数为 n 的编码器,设信号采集卡倍频数为 m ,则有角度换算关系为

或

式中
 ——编码器轴转角;
——编码器轴转角;
N ——编码器读数。
陀螺仪传感器是一个基于自由空间移动和手势的定位和控制系统。现代陀螺仪是一种能够精确确定运动物体方位的仪器,它是现代航空、航海、航天和国防工业中广泛使用的一种惯性导航仪,它的发展对一个国家的工业、国防和其他高科技的发展具有十分重要的战略意义。
传统的陀螺仪是采用机械式的,优点是精度高,但其缺点也很明显,如成本高、尺寸大、重量大、可靠性差。近些年,随着微机电系统(MEMS)的迅速发展,MEMS陀螺仪已经比较成熟,具有成本低、尺寸小、重量小、可靠性高等优点,其精度正在不断得到提高。利用惯性敏感元件测量载体相对于惯性空间的线运动和角运动参数,在给定运动初始条件下,由计算机推算出载体姿态方位、速度、位置等参数。这种测量方法是建立在牛顿力学定律的基础上,它不依赖于任何外界信息,也不向外界辐射能量,不易受到干扰,是一种完全自主式的姿态检测系统。机械式陀螺仪和MEMS陀螺仪分别如图3-44和图3-45所示。
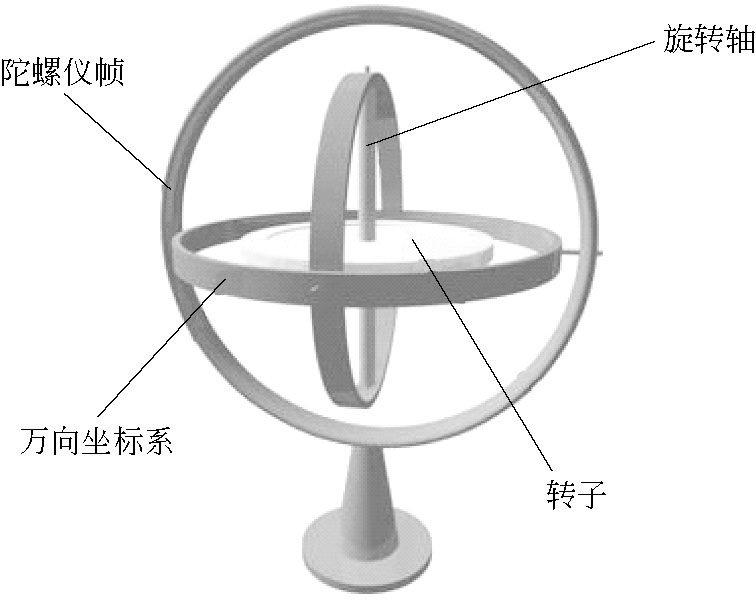
图3-44 机械式陀螺仪
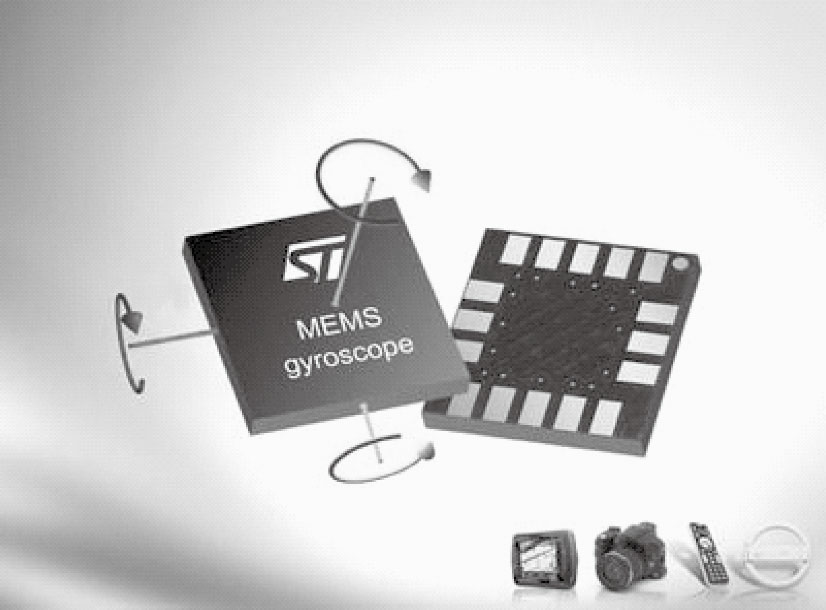
图3-45 MEMS陀螺仪
机器人视觉传感器是机器人最重要的传感器之一,在20世纪50年代后期出现,其发展十分迅速。视觉传感器一般由图形传感器及其相应的辅助设备组成,视觉传感器的最主要功能是获取外界的图像信息。一般来说,视觉传感器对外界进行的是二维图形处理,但是如果进行适当的信息处理,也可以识别出3D信息。
最常用的图形传感器有TV摄像机、激光扫描器、CCD传感器(图3-46)、CMOS传感器(图3-47)等。
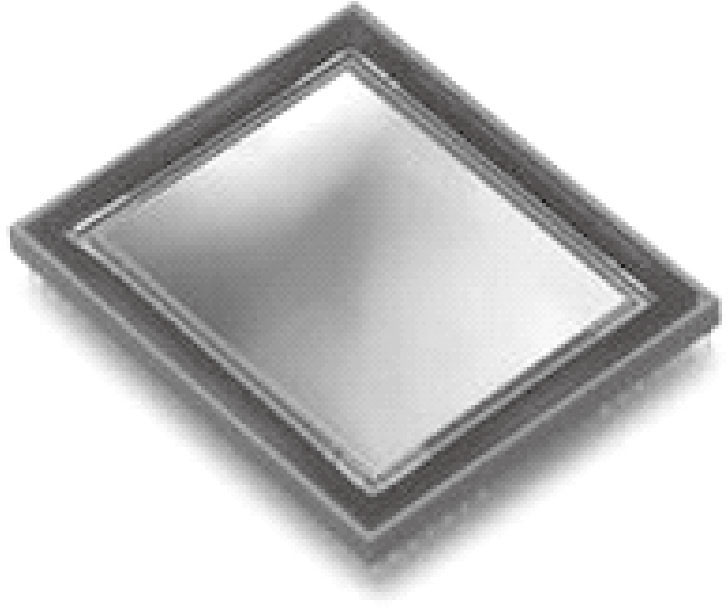
图3-46 CCD传感器
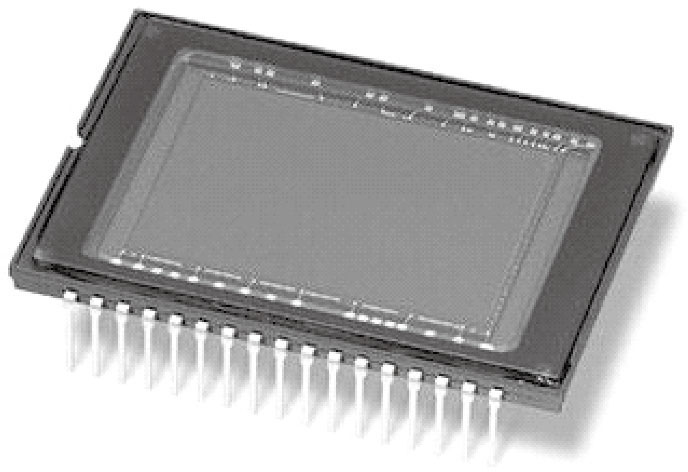
图3-47 CMOS传感器
CCD传感器的优点在于成像速度快,成像质量好。但在使用时需要进行复杂的内部参数校正和外部参数校正。此外制造工艺较为复杂,且价格较为昂贵。CMOS传感器相对于CCD传感器的成像效果较差,但优点在于使用时不需要专门进行校正。
力能使物体平动,转矩能使物体转动。力觉传感器就是用来测量作用在机器人上的外力和外力矩的传感器。测量力的传感器称为力传感器,测量力矩的传感器称为力矩传感器。在三维空间中,力可以分解为沿 X 、 Y 、 Z 三个方向的分量,转矩也可以分解为围绕着这三个轴的分量。根据所测力/力矩维数的不同,力觉传感器又可分为很多种。例如,测量三轴力的传感器,通常称为三维力传感器,能同时测量三轴力和三轴力矩(转矩)的传感器,称为六维力觉传感器,如图3-48所示。
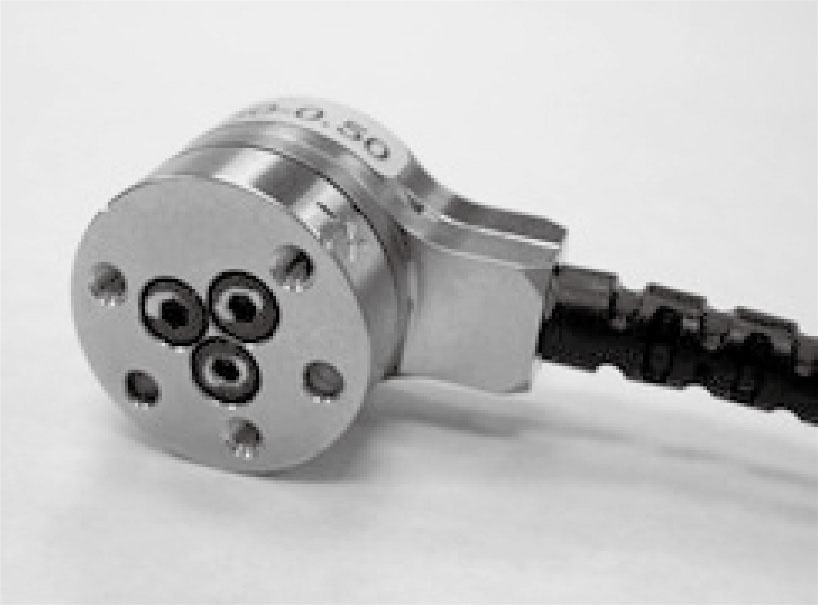
图3-48 六维力觉传感器
力觉传感器的工作原理一般是压电效应和应变电阻效应。传感器多采用应变片(一种物体的电阻与长度成正比的物质)。当力/力矩造成应变片的形状变化后,引起电阻的改变,从而测出外力或力矩。
传统的听觉传感器主要由麦克风及其相应的配件组成。麦克风是一种能把声音转化为电信号的仪器,它能够识别声音的强弱,如图3-49所示。随着科学技术的发展,传统的麦克风式听觉传感器现在已经逐渐被更小型、廉价,且具有更高性能的电容声敏传感器所取代,如图3-50所示。
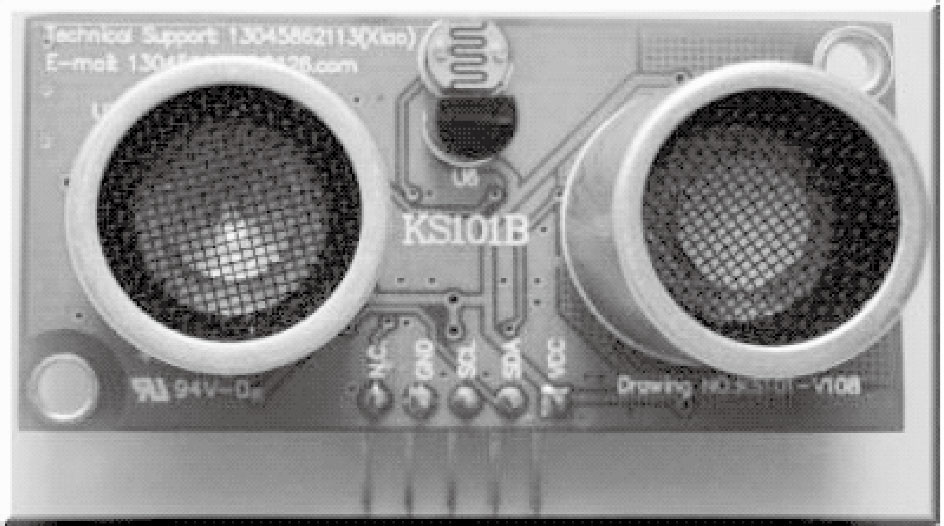
图3-49 麦克风式听觉传感器

图3-50 电容声敏传感器
无论是传统的麦克风式听觉传感器还是更高级的电容声敏传感器,其工作本质都是将语音声波信号转换成有一定幅度的模拟量电信号,然后再转换成计算机能够存储与处理的数字量。
我们知道,人类不仅能够识别声音的强弱,还能够识别“是谁”的声音。同样,机器人利用听觉传感器,采用相应的声音处理程序,不仅能够识别非特定人的语音,还能够实现特定人的语音识别。
① 非特定人语音识别 是指机器人能够根据声音的指令去执行相应的动作,但是不去区分是谁发出的这个指令声音。简而言之,机器人只要听到了指令声音就会去执行命令。非特定人的语音识别方法需要对一组有代表性的人的语音进行训练,从而找出同意语音的共同声音频率。
② 特定人语音识别 是指机器人不仅能够根据指令声音去执行相应的命令,还能识别出这是谁发出的指令。简而言之,机器人只会听到特定的人的声音指令后,才会去执行相应的命令。
现阶段,机器人对语音的识别还仅仅停留在较为低级的阶段,机器人还只能对一些特定的语句产生反应。远远达不到人类这样的反应水平。而这方面的原因,主要还是相应的声音处理方法不够先进,以及机器人本身的“智能”水平不高。
接近觉/距离觉传感器的主要目的是用来获取机器人与目标的接近程度,使机器人在移动过程中避免与周围环境发生意料之外的碰撞,以保护机器人。一般常用来作接近觉/距离觉传感器设备有超声波测距传感器、红外线测距传感器、激光测距传感器等。
① 超声波测距传感器 超声波测距原理是先发送一超声波脉冲,当超声波碰到障碍物后会反射回来,向控制器返回一个脉冲,根据声音在空气中的速度,通过测量发射超声波和接收来自障碍物回声的时间差,从而计算出到障碍物的距离。超声波测距传感器如图3-51所示。

图3-51 超声波测距传感器
超声波测距传感器的最大特点是在液体、固体等空间中的传播距离很远,穿透能力强。此外,声波还具有多普勒效应,因此利用超声波传感器来进行检测的设备被广泛应用在各行各业的领域中。
② 红外线测距传感器 其工作原理是传感器装置先向目标物发射出一红外线信号,当红外线信号遇到障碍物后会发生反射,根据目标物距离的不同,反射回来的红外线的强度也不同。从而实现对目标物的检测。红外线测距传感器如图3-52所示。
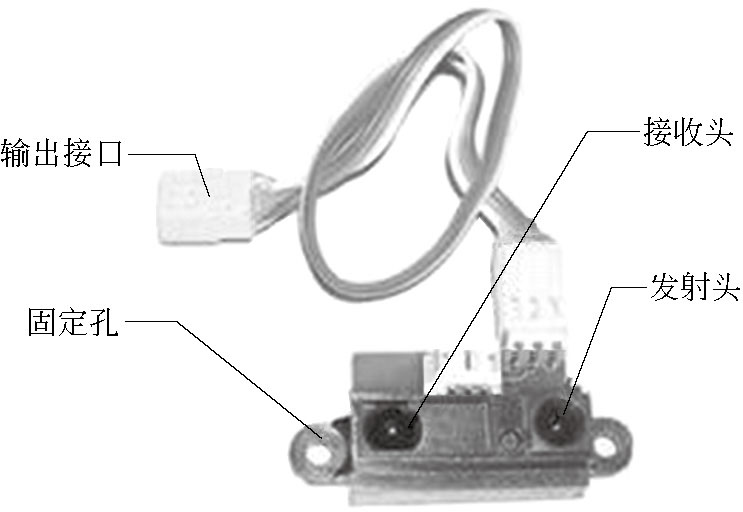
图3-52 红外线测距传感器
③ 激光测距传感器 它是利用激光技术进行测量的传感器,其组成和工作原理与红外线测距传感器的工作原理差不多。激光测距传感器的最大优点是测量速度快且测量精度高。此外,激光测距传感器的抗光电干扰能力强。激光测距传感器及内部结构简图分别如图3-53和图3-54所示。

图3-53 激光测距传感器
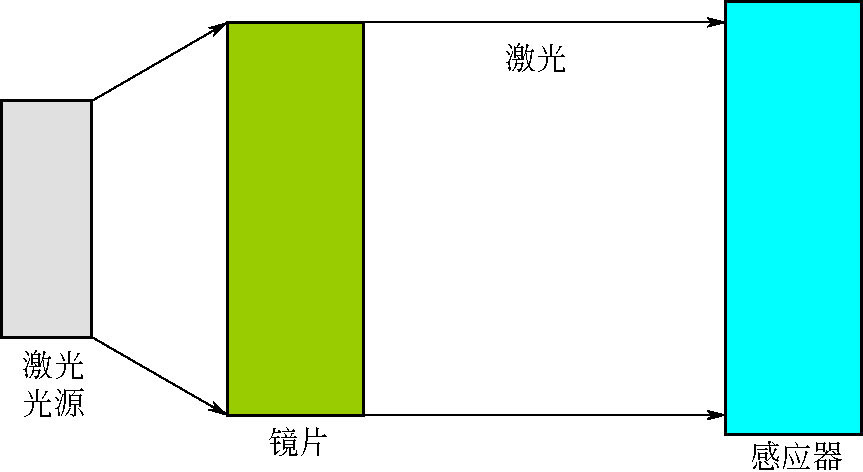
图3-54 激光测距传感器内部结构简图
味觉传感器主要是模仿人的味觉感知的基本原理和其他生物的相关味觉传感结构而工作的传感器,其工作原理是基于化学物质之间的反应。目前味觉传感器在普通机器人中用得不多,并不是机器人的通用传感器。但一些特殊环境下工作的机器人,如烹调机器人、食品分析机器人等,则需要配上相应的味觉传感器,用来检测相应的液体成分。
嗅觉传感器和味觉传感器差不多,只不过其工作检测的对象多为气体。通常用于检测空气质量、有害气体(如甲烷等)、烟雾、粉尘等。甲烷传感器如图3-55和图3-56所示。
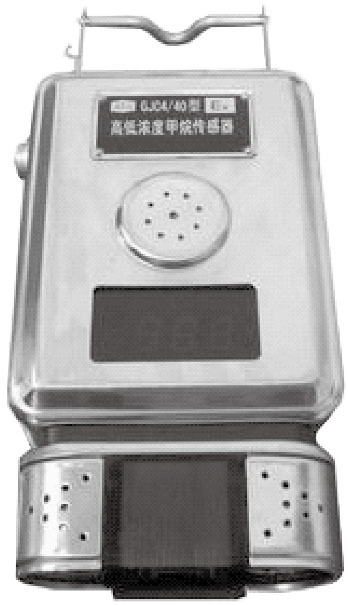
图3-55 甲烷传感器(一)

图3-56 甲烷传感器(二)
温度传感器的工作原理是利用热电阻或者热电偶的物理特性,从而能够检测温度变化的传感器,如图3-57所示。

图3-57 温度传感器
除了以上介绍的传感器外,机器人还有许多其他传感器,如湿度传感器、缓冲传感器、倾斜角传感器等。限于篇幅,在此不一一介绍。