
下载掌阅APP,畅读海量书库
立即打开




励磁绕组电压的允许变动范围一般为额定励磁电压的±5%左右。电压太高,电动机会发热;电压太低,电动机的性能将变坏,如堵转转矩和输出功率会明显下降,加速时间增加等。
当电动机采用幅值-相位控制时,应注意到励磁绕组两端电压会高于电源电压,而且随转速升高而增大。
控制绕组的额定电压有时也称最大控制电压,在幅值控制条件下加上这个电压,电动机就能得到圆形旋转磁场。
目前控制电动机常用的频率分低频和中频两大类,低频为50Hz(或60Hz),中频为400Hz(或500Hz)。因为频率越高,涡流损耗越大,所以中频电动机的铁芯需用更薄的硅钢片,一般低频电动机用厚度为0.35~0.5mm的硅钢片,而中频电动机用厚度为0.2mm以下的硅钢片。
中频和低频电动机一般不可以互相代替使用,否则电动机性能会变差。
定子两相绕组加上额定电压,电动机不带任何负载时的转速称为空载转速 n 0 。空载转速与电动机的极数有关。由于电动机本身阻转矩的影响,空载转速略低于同步转速 n s 。
定子两相绕组加上额定电压,转速等于零时的输出转矩,称为堵转转矩 T K (又称启动转矩 T st )。这时流过励磁绕组和控制绕组的电流分别称为堵转励磁电流和堵转控制电流。堵转电流通常是电流的最大值,可作为设计电源和放大器的依据。
当电动机处于对称状态时,输出功率 P 2 随转速 n 变化的情况如图3-10所示。当转速接近空载转速 n 0 的一半时,输出功率最大,通常就把这个点规定为两相异步伺服电动机的额定状态。电动机可以在这个状态下长期连续运转而不过热。这个最大的输出功率就是电动机的额定功率 P 2N 。对于这个状态下的转矩和转速称为额定转矩 T N 和额定转速 n N 。

图3-10 两相异步伺服电动机的额定状态
在额定励磁电压和空载情况下,使转子在任意位置开始连续转动所需的最小控制电压被定义为空载始动电压 U s0 ,通常以额定控制电压的百分比来表示。 U s0 越小,表示伺服电动机的灵敏度越高。一般要求 U s0 不大于额定控制电压的3%~4%。用于精密仪器仪表中的两相交流异步伺服电动机,有时要求 U s0 不大于额定控制电压的1%。
在额定励磁电压下,将任意控制电压时的实际机械特性与线性机械特性在转矩 T e = T st /2( T st 为启动转矩)时的转速偏差Δ n 与空载转速 n 0 (对称状态时)之比的百分数,定义为机械特性非线性度 k m ,即
机械特性的非线性度如图3-11所示。
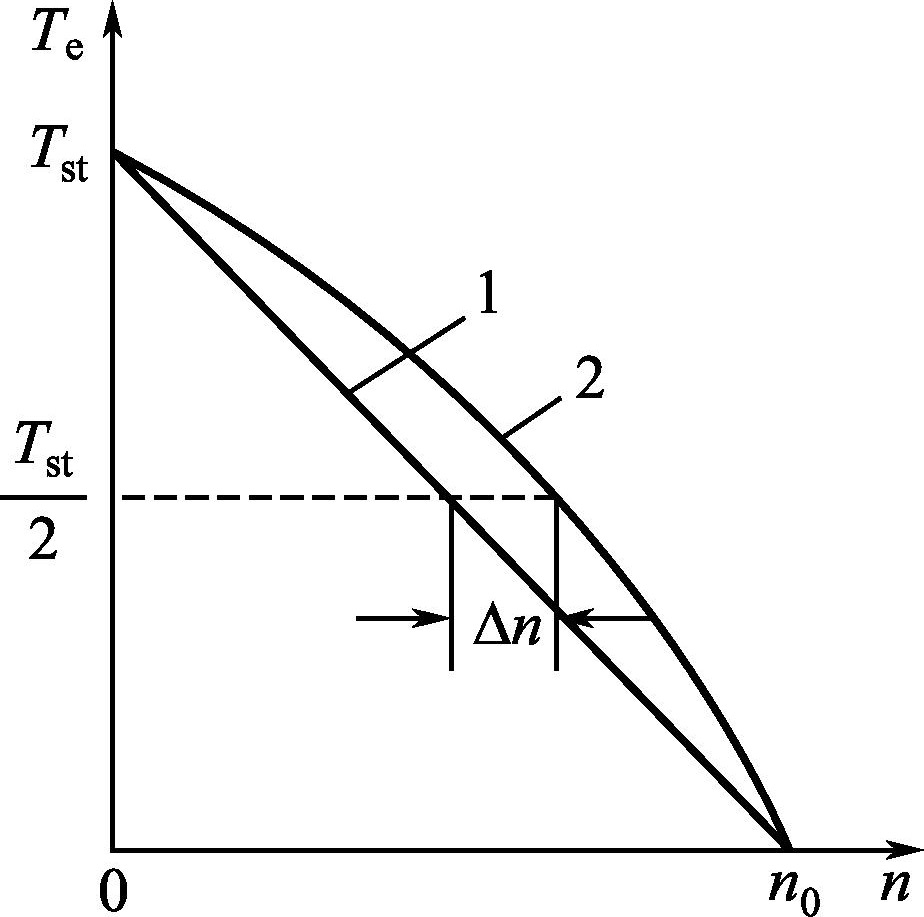
图3-11 机械特性的非线性度
1—线性机械特性;2—实际机械特性
在额定励磁电压和空载情况下,当 α e =0.7时,实际调节特性与线性调节特性的转速偏差Δ n 与 α e =1时的空载转速 n 0 之比的百分数,被定义为调节特性非线性度 k v ,即
调节特性的非线性度如图3-12所示。
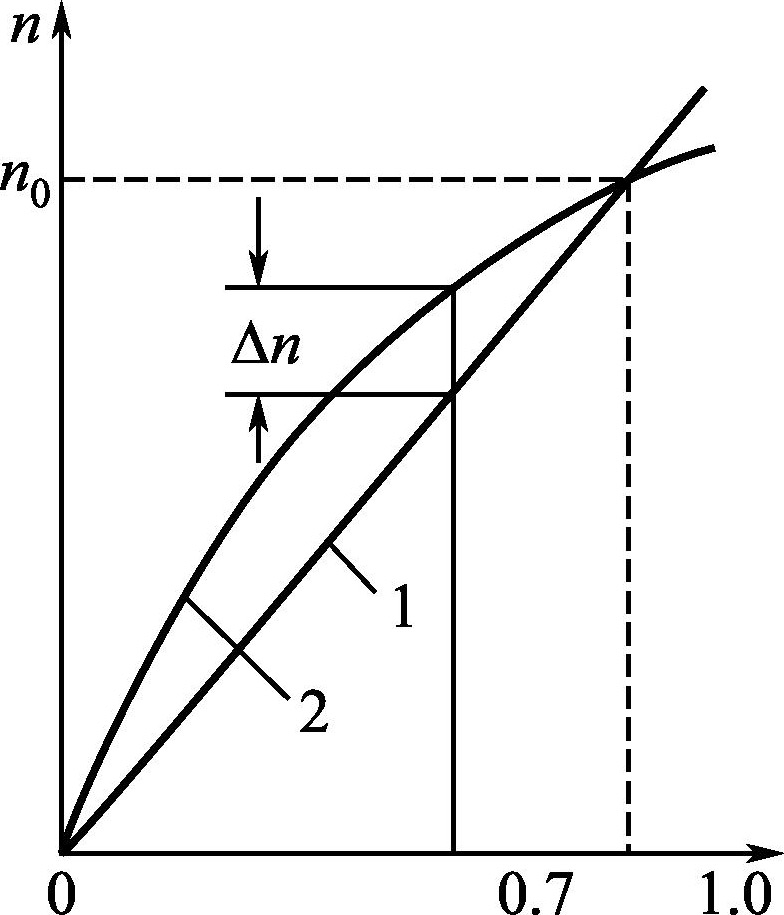
图3-12 调节特性的非线性度
1—线性调节特性;2—实际调节特性
以上特性的非线性度越小,特性曲线越接近直线,系统的动态误差就越小,工作就越准确,一般要求 k m ≤10%~20%, k v ≤20%~25%。
当转子电阻相当大时,交流伺服电动机的机械特性接近于直线。如果把 α e =1时的机械特性近似地用一条直线来代替,那么与这条机械特性相对应的机电时间常数就与直流伺服电动机机电时间常数表达式相同。
对伺服电动机而言,机电时间常数 τ m 是反映电动机动态响应快速性的一项重要指标。在技术数据中给出的机电时间常数是用对称状态下的空载转速 n 0 代替同步转速 n s ,按照下式计算所得,即
式中, T k0 仍为对称状态下的堵转转矩; J 为伺服电动机的转动惯量。
考虑到机械特性的非线性及有效信号系数变化的影响,两相交流异步伺服电动机实际运行时的机电时间常数 τ ' m 与 τ m 有所不同。