
下载掌阅APP,畅读海量书库
立即打开



The study of macroscopic continuum traffic flows began with the well-known Lighthill-Whitham-Richards(LWR)model or kinematic wave model which was proposed independently by Lighthill and Whitham(1955);Richards(1956).The model assumes that a discrete flow of vehicles can be approximated by a continuous flow.And then,vehicle dynamics can be described by the spatial vehicle density ρ ( x , t )as a function of location x and time t .As a result,many theoretical and numerical methods were developed to study this property based on the hyperbolic partial differential equation(PDE)type traffic flow model.
The conservation law of vehicles in an arbitrary stretch[ x 1 , x 2 ]of the road,over an arbitrary time interval[ t 1 , t 2 ],is written as:

where ρ ( x , t )(veh/km)is the mean density at location x and time t , v ( x , t )(km/h)is the mean velocity at location x and time t .
However,weak solutions of Eq.(2.1)are not unique,and not all weak solutions capture the physics of traffic flow correctly(Jabari and Liu 2012).In order to derive the conservation law of traffic flow,Prigogine and Herman(1971)defined the phase space density as a production of
ρ
(
x
,
t
)and the velocity distribution
 (
v
|
x
,
t
),i.e.,
(
v
|
x
,
t
),i.e.,

Where
 (
x
,
t
,
v
)is the phase space density function,that is,the joint PDF with respect to
v
at location
x
and time
t
,the velocity distribution satisfies
(
x
,
t
,
v
)is the phase space density function,that is,the joint PDF with respect to
v
at location
x
and time
t
,the velocity distribution satisfies
 ,
,
 .
.
Let
 denotes the transition rate from state(
x
,
v
)to(
y
,
u
),where
x
and
y
represent locations,
v
and
u
represent velocities.Then the backward Kolmogorov type master equation that depicts the evolution of phase space density is
denotes the transition rate from state(
x
,
v
)to(
y
,
u
),where
x
and
y
represent locations,
v
and
u
represent velocities.Then the backward Kolmogorov type master equation that depicts the evolution of phase space density is
Suppose when t →∞,the phase space density tends to a steady state,i.e.,

Expand Eq.(2.4)to the total derivative

Integrate Eq.(2.5)with respect to v ,we have

Simplify Eq.(2.5),the reduced form is
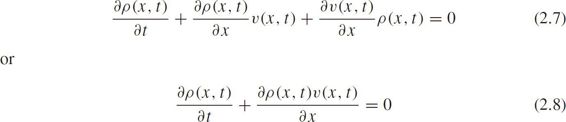
Incorporate the equilibrium flow function q e ( ρ ),we have the hyperbolic PDE of LWR model as

The cell transmission model(CTM)was proposed by Daganzo(1994,1995a)as a direct discretization of LWR model to simulate traffic flow evolutions using the Godunov Scheme(Lebacque 1996),in which the flow rate was modeled as a function of density with a triangular or trapezoidal form.Various modifications of the CTM model had been proposed in last two decades.For example,CTM was extended to model network traffic flow with general fundamental diagrams(Daganzo 1995b).Lags were introduced to formulate the lagged cell transmission model(LCTM)that adopted a nonconcave fundamental diagram,in the fact that,the forward wave speed was larger than the backward wave speed(Daganzo 1999).Recently,the original LCTM was modified by Szeto(2008)as the enhanced LCTM(ELCTM)to guarantee that the nonnegative densities would not be greater than the jam density.To validate the parameters online by loop detectors data,a switching mode model(SMM)was formulated,in which the evolution of traffic density switched among different sets of linear difference equations(Muñoz et al.2003,2006).The asymmetric cell trans-mission model(ACTM)was applied in optimal freeway ramp metering by Gomes and Horowitz(2006);Gomes et al.(2008).The cell-based dynamic traffic assignment formulation was further developed for networks.Lo et al.(2001);Lo and Szeto(2002);Boel and Mihaylova(2006)proposed the compositional CTM afterwards.
To model the evolutions of velocity more accurately,higher-order terms of density and velocity were incorporated.The higher-order density gradient type dynamic equation has the following expression

where v = v ( x , t ), ρ = ρ ( x , t ), v e ( ρ )is the equilibrium velocity-density function, τ is the relaxation time, c 0 ≥0 is the substitution variable with the same unit as velocity,{ v + c 0 , v − c 0 }are the characteristic velocities. v + c 0 is larger than the macroscopic velocity of traffic flow,so that this model was criticized by Daganzo(1995c).
In order to overcome the problem,higher-order velocity gradient type dynamic equation was derived as

where characteristic velocities are not larger than the macroscopic velocity of traffic flow,i.e.,{ v , v − c 0 }≤ v ,so there are no reverse movements(Daganzo 1995c).
Helbing et al.(2009)proposed a general form for the higher-order model.They regarded that it was not contradictory when the characteristic velocity was larger than the macroscopic velocity.The general form is

where
P
1
=
P
1
(
ρ
,
v
)and
P
2
=
P
2
(
ρ
,
v
)are pressure terms,satisfying
 .
.
Analogously,we propose the following general macroscopic traffic flow model

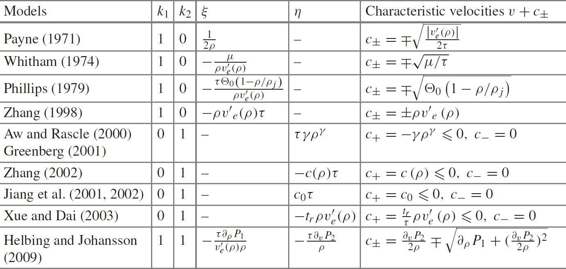
where k 1 , k 2 are the weighted coefficients for the density gradient term and the velocity gradient term, ξ = ξ ( ρ , v )and η = η ( ρ , v )reflect the anticipative and adaptive driving behaviors,respectively.
We obtain the general simultaneous PDEs

The analytical linear stability condition for this general model is as following(refer to the detailed derivation in Appendix A)

Characteristic velocities are v + c ± ,where

Common mesoscopic models belong to three categories(Hoogendoorn and Bovy 2001):time-headway distribution models,cluster models,and gas-kinetic models.
The book will discuss headway distribution models in Sect.2.3.Due to the space limitation,cluster models will be omitted.We will briefly show the idea of gas-kinetic model(Table 2.1).Prigogine and Herman(1971)proposed the following Boltzmann equation

Table 2.1 Typical macroscopic traffic flow models
Acceleration behaviors can be modeled by the relaxation process that transforms from velocity distribution
 to the expected velocity distribution
to the expected velocity distribution


Interactions among vehicles are

where

Recently,mesoscopic traffic simulation has been attracted more efforts on the operations of dynamic traffic systems,e.g.,CONTRAM(Leonard et al.1989),DYNASMART(Jayakrishnan et al.1994),FASTLANE(Gawron 1998),DYNAMIT(Ben-Akiva et al.2010),INTEGRATION(van Aerde and Rakha 2002),MEZZO(Burghout et al.2006),DYNAMEQ(Snelder 2009),dynaCHINA(Lin and Song 2006),etc.
Microscopic traffic flow model utilizes the Lagrangian method to study traffic flow dynamics by describing one vehicular trajectory or interactions among multiple vehicles.Microscopic modeling can be divided into car-following model and lane changing model.This section only reviews the theoretical development of car-following models.Common car-following models include:stimulus response model,safe distance or behavioral model,psychological-physical/action point model,artificial intelligence-based model,cellular automaton(CA),etc.
The updating equations of velocity and location are

where
x
n
(
t
)is the location of the nth vehicle at time
t
,
 is the velocity of the
n
th vehicle at time
t
,△
t
is the updating time step.
is the velocity of the
n
th vehicle at time
t
,△
t
is the updating time step.
The general form of acceleration equation is

Table 2.2 shows the long-term evolution of typical microscopic car-following models.We can expand Eq.(2.23)to the scenario of a multiple-car-following model as

where m is the number of vehicles that influence the n th vehicle.
Table 2.2 Typical microscopic traffic flow models
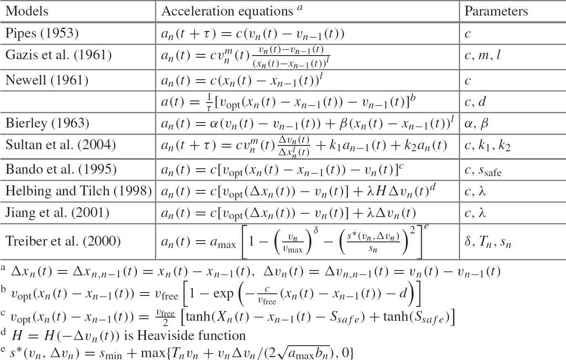
In the past decade,some multi-anticipative car-following models were proposed to enhance the stability of traffic flow.One approach assumed that the individual location and velocity information could be shared among different vehicles to simulate multi-anticipative behaviors via inter-vehicle communications(Li and Wang 2007).Other approaches emphasized the multi-anticipative behaviors of human drivers and tried to model the actions of drivers via simulation models(Treiber et al.2006a).Numerical experiments showed that multi-vehicle interactions generally enlarged the stable region of traffic flow.For example,based on the extended optimal velocity model(OVM)and full velocity difference model(FVDM),Lenz et al.(1999)showed that the stability of traffic flow was improved by taking into account relative velocities of vehicles.Results indicated that the multi-anticipative behavior enlarged the linear stability region.On the contrary,the human reaction or manipulation delays might lead to the instability of traffic flow.Appendix B applies perturbation analysis(PA)to derive the critical linear stability condition for multi-car-following models.
However,the common problem of typical models listed in Table 2.2 is to define a deterministic acceleration equation.Infield applications,vehicles are influenced by many stochastic internal and external factors that are not taken into consideration in the classic deterministic acceleration equation based models.How to depict the stochastic characteristics of driving behaviors and time-varying traffic flow states more accurately will be discussed in Chap.4 by using the Markov model based on headway/spacing distributions.
Road traffic flow is influenced by various random factors,including both external factors such as the weather,and internal factors such as transportation facilities,vehicle characteristics,driver behaviors,etc.These stochastic factors make the deterministic approaches difficult to accurately estimate or predict dynamic traffic evolutions.To overcome this problem,numerous stochastic approaches were developed for continuous traffic flow modeling.In this study,they are divided into the following four categories:
In summary,the four categories of stochastic approaches can be generally written as

where Θ( x , t )is the vector of traffic states at location x and time t , f (•)is the traffic state evolution function, ε ( x , t )is noise function.
First,in macroscopic modeling,Boel and Mihaylova(2006)proposed a stochastic compositional model for freeway traffic flows,where the randomness was reflected in the probability distributions of sending and receiving functions,also in the well-defined noise term of speed adaptation rules.Sumalee et al.(2011)proposed a first-order macroscopic stochastic cell transmission model(SCTM),each operational mode of which was formulated as a discrete time bilinear stochastic system to model traffic density of freeway segments in stochastic demand and supply.However,this approach still assumed a deterministic FD with a second-order wide-sense stationary(WSS)noisy disturbance.Wang et al.(2005,2006,2009b)presented a general stochastic macroscopic traffic flow model of freeway stretches based on a traffic state estimator using extended Kalman filtering and developed the freeway network state monitoring software(i.e.,REal-time motorway Network trAffIc State Surveil-lANCE,RENAISSANCE).
Secondly,in microscopic modeling,Wagner(2011)proposed a time-discrete stochastic harmonic oscillator for car-following based on the deterministic acceleration Eq.(2.23),i.e.,
 where
ε
is the noise term.Huang et al.(2001)proposed a stochastic CA model by incorporating braking probability,occurrence,and dissipation probability.Some other approaches include Nagel and Schreckenberg(1992);Zhu et al.(2007).Since microscopic car-following model is highly correlated with headway/spacing distributions,we will further discuss a Markov model to depict headway/spacing evolutions in Chap.4.
where
ε
is the noise term.Huang et al.(2001)proposed a stochastic CA model by incorporating braking probability,occurrence,and dissipation probability.Some other approaches include Nagel and Schreckenberg(1992);Zhu et al.(2007).Since microscopic car-following model is highly correlated with headway/spacing distributions,we will further discuss a Markov model to depict headway/spacing evolutions in Chap.4.
Thirdly,in stochastic FD and its phase transition analysis,the classic assumption is the existence of deterministic functions of flow-density and speed-density.FD has been the foundation of traffic flow theory and transportation engineering.According to the definition by Edie(1961),in the t ~ x vehicular trajectory diagram,we have

Where | A | is the area of an arbitrary region A , T i ,and D i are the travel time and distance for the i th vehicle in A .
Treiber et al.(2006b)investigated the adaptation of headways in car-following models as a function of the local velocity variance to study the scattering features in flow-density plot.Ngoduy(2011)argued that the widely scattering flow-density relationship might be caused by the random variations in driving behavior.The distribution features and probabilistic boundaries estimation method will be further discussed in Chap.5.
At last,in transportation reliability studies,Brilon et al.(2005)pointed out that the concept of stochastic capacities was more realistic and more useful than the traditional concept of deterministic capacity.In the last decade,many efforts were made to identify the characteristics of traffic flow breakdown and its occurrence condition(Evans et al.2001;Kerner and Klenov 2006;Kesting et al.2010;Smilowitz and Daganzo 2002).Usually,traffic breakdown phenomena can be triggered by external disturbances or internal perturbations.This book only considers the latter one that has been widely observed and validated when studying the features of oscillations(Banks 2006;Del Castillo 2001;Jost and Nagel 2003;Kerner and Klenov 2006;Kim and Zhang 2008;Lu and Skabardonis 2007;Son et al.2004;Wang et al.2007).Many approaches can be used in traffic flow breakdown phenomena.For example,Bassan et al.(2006)used the mathematical property of log periodic oscillations(LPO)to model traffic density over time.Habib-Mattar et al.(2009)developed a density-versus-time model to describe traffic breakdown,it was found that density increased sharply toward the peak period and then decreased and increased again toward the breakdown.Since density cannot be directly measured infield,many researchers tend to study the relationship between traffic flow breakdown probability with the upstream flow.In general,the probability shows an increasing sigmoid curve in terms of the upstream flow,where Weibull distribution is commonly incorporated to formulate the curve(Banks 2006;Brilon et al.2005;Chow et al.2009;Lorenz and Elefteriadou 2001;Mahnke and Kühne 2007).Chen and Zhou(2010)proposed the α -reliable mean-excess traffic equilibrium(METE)model that explicitly considered both reliability and unreliability aspects of travel time variability in the route choice decision process.Stochastic capacity is highly correlated with traffic flow breakdown probability,and the analytical derivation of phase transition will be present in Chap.6.
Differing from the above four kinds of stochastic approaches,Mahnke et al.(2001,2005);Mahnke and Kühne(2007);Mahnke and Pieret(1997)applied stochastic process to the dynamic mechanism of traffic congestion occurrence and dissipation based on time-varying probability distributions,by using master equation of statistical physics to analyze the phase transitions and nucleation phenomena in jam queues.The general form of master equation is(Chowdhury et al.2010;van Kampen 2007)

where
z
and
z′
are continuous state variables,
t
is continuous time,
P
(
z
,
t
)is the probability of being in state
z
at time
t
,
 is the transition rate from state
z
to
z′
,satisfying
is the transition rate from state
z
to
z′
,satisfying
 .
.
In stochastic traffic flow modeling,traffic states are usually represented by discrete variables.Let S be an arbitrary discrete state,the probability that traffic belongs to state S at time t is P S ( t ).The evolution of traffic states can be described by the following discrete master equation

Where
 is the transition rate from state
S
to
S′
,satisfying
is the transition rate from state
S
to
S′
,satisfying
 ,the first term on the right side is the transition rate from one state
S′
to the current state
S
,the second term is the transition rate from the current state
S
to another state
S′
.
,the first term on the right side is the transition rate from one state
S′
to the current state
S
,the second term is the transition rate from the current state
S
to another state
S′
.
Furthermore,when traffic state and time are both discrete,suppose traffic state is S at time t ,according to the master equation in Eq.(2.29),at time t +△ t ,the probability that traffic still belongs to state S is

Regard the formation and dissipation of a jam queue as a Markov process,and assume at most one vehicle can join the jam queue in a differentiation δt ,i.e.,the probability that two or more vehicles join the jam queue in δt is o ( δt ),then the master equation of the jam queue length distribution is

where
ω
+(
n
)and
ω
−(
n
)are the transition rates for a jam queue length changes of
 and
and
 vehicles,respectively.
vehicles,respectively.
Mahnke et al.(2001,2005);Mahnke and Kühne(2007);Mahnke and Pieret(1997)studied the occurrence and evolution of jam queues in a homogeneous circle road with periodic boundary conditions,and defined the joining and leaving rates as

where the joining rate is calculated by the OVM,the optimal free-flow velocity is v opt (△ x free ( n )),the congested optimal velocity is v opt (△ x cong ( n )),and△ x cong ( n )=△ x cong .Then we get the jam queue length L cong = n △ x cong and the free-flow length L free = L − L cong = n △ x cong , L is the length of the circle road. τ out is the mean waiting time for a vehicle to leaving a jam queue.
Furthermore,Kühne et al.(2002)applied the master equation-based nucleation model to traffic flow breakdown phenomenon in ramping bottlenecks,and formulated the Fokker-Planck equation that described the jam queue evolutions.