
下载掌阅APP,畅读海量书库
立即打开



由2.1节可知,时标上的线性矩阵方程(1.4.1)的解具有多项式表达,且其系数完全由与 ω 相伴的动态解决定。本节将与 ω 相伴的动态解记为 f ω ( t ),并讨论 f ω ( t )的显式表达。
本节假设 ω ( t )具有如下形式

其中
a
j
为互不相同的复数,
m
j
为非负整数且满足
 n
+1。
n
+1。
由于
 ,我们首先考虑微分算子(
D
-
al
)
k
。
,我们首先考虑微分算子(
D
-
al
)
k
。
 如(1.4.6)所示,通过简单演算易得
如(1.4.6)所示,通过简单演算易得

满足

我们知道,函数集合
 时是线性无关的
[92]
。事实上,对于一般的时标
时是线性无关的
[92]
。事实上,对于一般的时标
 ,也是线性无关的。
,也是线性无关的。
引理2.2.1
设
为一时标,
上的基本广义指数多项式为

则函数集合
 线性无关。
线性无关。
证明:
首先证明对于固定的
 ,集合
,集合
 线性无关。
线性无关。
任取 n 个不同的函数

不妨设 k 1 < k 2 <…< k n 。
若
用
 作用(2.2.4)得
作用(2.2.4)得

故 λ n =0。以此类推可得

即
 线性无关。
线性无关。
其次证明函数集合
 线性无关。
线性无关。
任取两两不同的
n
(
n
>1)个数
 ,设
,设

用算子
 作用(2.2.7)有
作用(2.2.7)有
故有
λ
n
=0。同理可以证明
λ
1
=
λ
2
=…
λ
n
-1
=0,所以函数族
 线性无关。
线性无关。
下面用数学归纳法证明函数集合
 线性无关。
线性无关。
任取两个函数
 。
。
设

若
a
=
b
,不妨设
k
<
m
.用
 作用(2.2.10)式两端有
作用(2.2.10)式两端有
 ,故
λ
2
=0。再由(2.2.10)式得
λ
1
=0。
,故
λ
2
=0。再由(2.2.10)式得
λ
1
=0。
若
a≠b
,用
 作用(2.2.10)式两端有
作用(2.2.10)式两端有

故 λ 2 =0。再由(2.2.10)式得 λ 1 =0。
所以 g a,k , g b,m 线性无关。
假设集合 G 中任意 n 个函数线性无关。
任取
n
+1个两两互不相同的函数

 。
。
设

若
 ,用算子
,用算子
 作用(2.2.11)式两端有
作用(2.2.11)式两端有

从而 λ n +1 =0,由归纳假设得 λ 1 = λ 2 =…= λ n =0。
若
 中至少有两个数相等,不妨设
a
1
=
a
2
=…
a
m
,且
k
1
<
k
2
,…<
k
m
,其中1<
m
≤
n
+1。
中至少有两个数相等,不妨设
a
1
=
a
2
=…
a
m
,且
k
1
<
k
2
,…<
k
m
,其中1<
m
≤
n
+1。
用算子
 作用(2.2.11)式两端有
作用(2.2.11)式两端有

从而
λ
m
=0,再由归纳假设有

 。
。
综上,函数集合
 线性无关。
线性无关。
我们把由集合
 生成的复向量空间记为
ε
,称
ε
中的元素为广义指数多项式。
生成的复向量空间记为
ε
,称
ε
中的元素为广义指数多项式。
易见,函数组
 的任意线性组合都是(
D
-
aI
)
j
核空间中的元素。因此若
ω
如(2.2.1)所示,则集合
的任意线性组合都是(
D
-
aI
)
j
核空间中的元素。因此若
ω
如(2.2.1)所示,则集合
 生成的向量空间包含在
ω
(
D
)的核空间内。
生成的向量空间包含在
ω
(
D
)的核空间内。
在集合 S 上定义可交换的卷积运算*。
若 a ≠ b ,定义

其中

若 a = b ,定义

定义线性运算为

对
 。
。
则卷积运算可线性扩张到空间 ε 上。
定义 ε 上的线性泛函Φ为

事实上,即为
 处的值。
处的值。
引理2.2.2
设Φ为
ε
上的线性泛函(2.2.17)。那么对任意
f
 ,有
,有

证明: 只需验证

再由线性条件即得(2.2.18)。
(2.2.19)式的左端为
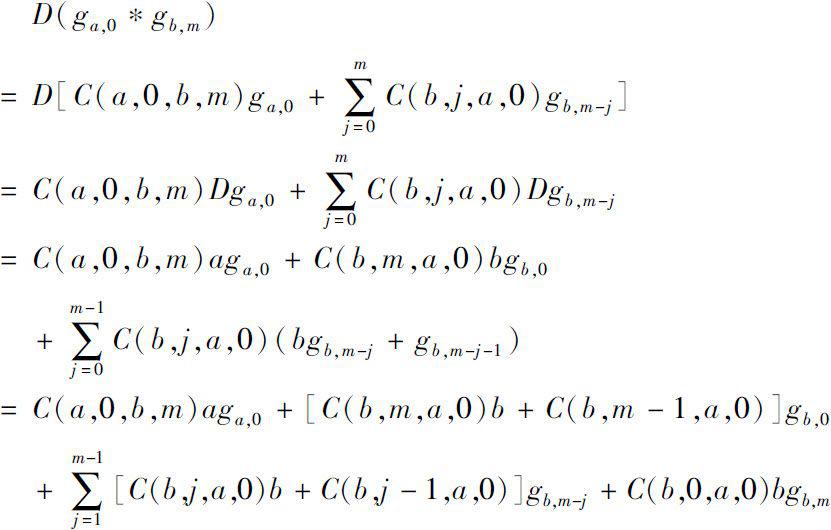
(2.2.19)式的右端为
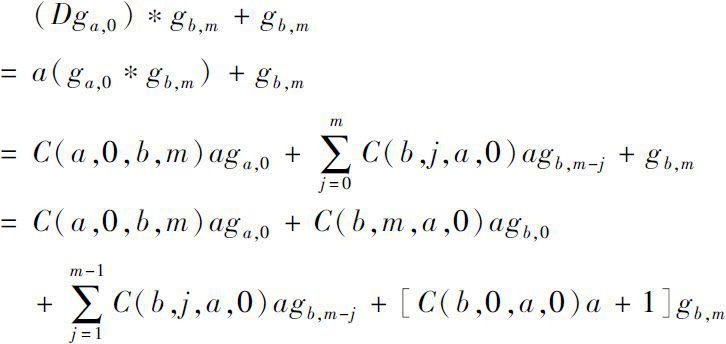
两端 g b,j ,0≤ j ≤ m 的系数均相等,故(2.2.19)式成立。
与 ω 相伴的动态解 f ω 可以写成指数多项式的卷积形式,即

下面给出定理1.4.2的证明。
定理1.4.2的证明 :由卷积的定义易知由 S 生成的 ε 的子空间关于卷积运算*是封闭的,因此 ω ( D ) f ω =0。只需验证 f ω 满足(1.4.3)的初值条件即可。由(1.2.14)及(2.2.15),我们有

由(2.2.16)知

因此,任意两个指数多项式的卷积在 t =0点的值均为零。从而有

下面我们来确定 f ω 的初值。
若
ω
只有一个
n
+1重根
a
,则
 。令0≤
k
≤
n
,由于
。令0≤
k
≤
n
,由于
 ,有
,有

从而有

若 ω 至少有两个不同的根,设 n >1,0≤ k ≤ n 。
f ω 以写成

其中

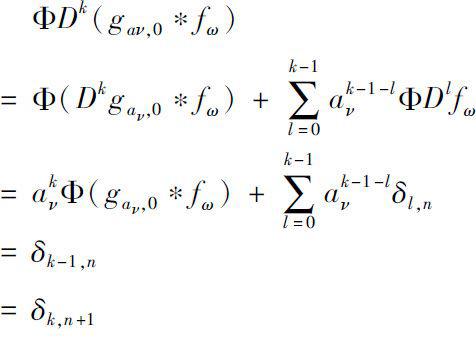
由引理2.2.2有
 ,故
,故

按(2.2.28)依次迭代得

往证

对 n 用数学归纳法证明(2.2.30)。
当
n
=1时,
 。若
k
=0,则
。若
k
=0,则

若 k =1,则

由(2.2.31)及(2.2.32)得
 。
。
假设(2.2.30)在 n 时成立。对 n +1,设

其中

由(2.2.2)得
 。故
。故

对0≤ k ≤ n +1,由(2.2.29)式及(2.2.30)式有
综上,(2.2.30)式成立,故
 是与ω相伴的动态解。
是与ω相伴的动态解。
我们还可以考虑线性常矩阵▽动力学方程 [7]

其中
A
为
m
阶常矩阵,
 为矩阵值函数。
为矩阵值函数。
称方程(2.2.34)的解为▽矩阵指数函数,记为
 。
。
与Δ动力学方程(1.4.1)的讨论类似,我们可以对应得到▽动力学方程(2.2.34)的求解方法。这里只列出一些主要的内容。
设ω同(1.4.2)。称初值问题
的解为与ω相伴的▽动态解,其中 D 代表▽导算子。
定义时标
上的▽多项式序列为

其中
 是方程
是方程

的解。
定义时标
上的基本▽指数多项式为

定义卷积运算
 为
为

其中

我们可以利用与ω相伴的▽动态解将矩阵方程(2.2.34)的解表示成 A 的多项式。
定理2.2.1
设
 为ω的Horner多项式;
为ω的Horner多项式;
 是与ω相伴的▽动态解。
是与ω相伴的▽动态解。
则▽动力学方程(2.2.34)的解(即▽矩阵指数函数)为
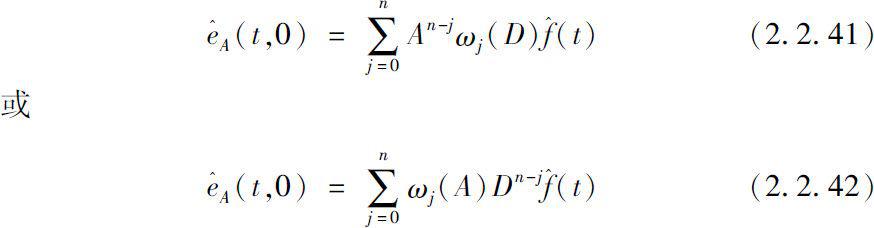
证明: 与定理1.4.1类似,略。
由(2.2.41)和(2.2.42)可见,▽矩阵指数函数的系数完全由与ω相伴的▽动态解决定。
我们同样可以得到与ω相伴▽动态解的显式表达式。
定理2.2.2 设ω同(1.4.2),令

则
 是与ω相伴的▽动态解。
是与ω相伴的▽动态解。
证明: 证明与定理1.4.2类似,略。
由定理2.2.1和定理2.2.2即可得到▽动态方程(2.2.34)的解的显式表达。